CUADERNO DE BITÁCORA
Agosto de 2022
1ª semana
Empezamos
la nueva temporada con la liberación del nuevo desafío el martes 2 ¡Qué
ganas! En este video se describe el Juego del Robot:
Se puede consultar más información en el siguiente enlace: https://www.firstlegoleague.org/season#mmbi, sobre todo las actualizaciones.
Lo
más novedoso del Juego del Robot esta temporada es que hay dos zonas de
lanzamiento, incluidas en 2 Casas, una a cada lado del tapete, con lo
que podrán participar hasta 4 técnicos en la misma partida (pueden
seguir cambiándose como en años anteriores mientras haya un máximo de
4). Se distribuyen 2 técnicos en cada Casa y no podrán intercambiarse ni
pasarse material entre ellos, sobre todo el Dinosaurio.
El robot sí que podrá salir de cualquiera de las 2 Casas y volver a cualquiera de las dos.
Este
máximo de 4 técnicos será un mayor desafío para equipos con menos de 4
componentes y en inferioridad respecto a equipos más numerosos, ya que
si un equipo tiene 3 componentes, el técnico que esté solo en una Casa
no tendrá la ayuda de un compañero al cambiar accesorios. No digamos un
equipo de 2 si quieren aprovechar ambas Casas, ya que no pueden
interactuar entre ellos.
Estos son los modelos de misión:
2ª semana
Como
no tendremos el nuevo set hasta septiembre (o eso esperamos 😅), vamos
construyendo algún modelo de misión para ir probando. Empezamos con la
Fábrica de Juguetes y el Coche Híbrido.
 |
Toy Factory
|
 |
Hybrid Car
|
Esta
temporada han introducido una pieza nueva que no tenemos, por lo que
nos apañamos para sustituirla y procurando que el modelo funcione
perfectamente. se trata de una viga con orificios perpendiculares, como
los rectángulos tan útiles pero en 1D.
Además
de ver ya la estrategia a seguir para intentar hacer todas las
misiones, nos las repartiremos para ir preparando nuestro clásico
videotutorial, y así procurar aclarar las dudas que vayan surgiendo,
sobre todo de los nuevos equipos.
3ª semana
Seguimos
construyendo modelos de misión. Esta vez la Central Eléctrica, parte de
la Planta Petrolífera y el Camión Cisterna, para comprobar si las 3
Unidades de Combustible entran en él sin problemas
 |
Power Plant
|
 |
Oil Platform
|
Estuvimos
hablando de nuevo con Brian, nuestro árbitro en Houston, que se ofreció
muy amablemente a enseñarnos los modelos Super Powered y cómo
funcionan. El más complicado de mover puede ser el Aerogenerador, para
liberar las 3 Unidades de Energía.
4ª semana
Aprovechamos
la invitación de los técnicos de Klingele, Laura y Jonathan, para
visitar su fábrica, en agradecimiento por su ayuda con nuestro proyecto
WAPack de Cargo Connect. Fue super interesante y al final vimos en vivo y
en directo cómo se hacen las cajas que todos usamos.
Allí
vimos que el cartón corrugado es realmente una superposición de 3 o más
capas de papel de distinto gramaje, con el intermedio ondulado y
encolado a las cubiertas.
 |
Bobinas que pesan casi 3 toneladas cada una.
|
 |
El área de clichés y troqueles, "una galería de arte"
|
Lo
mejor fue la última adquisición: una máquina completamente automática
que puede imprimir en 5 colores, una de las más avanzadas del mundo.
 |
Una máquina muy lista
|
Pueden hacerse una idea de esta fábrica en el siguiente video:
Septiembre de 2022
5ª semana
Primer finde de la nueva temporada en nuestro local. Probamos los programas en Python que habíamos aprendido durante el verano con nuestros robots.
Y vimos algo de la estrategia del Juego del Robot.
También
repasamos la Reglas del Robot y las actualizaciones que han salido
hasta ahora, que aclaran una duda que teníamos acerca de si se podría
pasar con la mano el robot de una Casa a la otra. La respuesta es no. 😅
Además han tenido que modificar las instrucciones de construcción del
modelo del Aerogenerador, ya que las Unidades de Energía se trababan
algo al salir.
Celebramos
la reunión anual de nuestra asociación socioeducativa, para ver las
actividades a realizar en 2023, el presupuesto necesario, el estado del
proyecto E=Wall y temas
pendientes de la temporada pasada, como el pago de la inscripción en el
Mundial, que nos prometió el Cabildo de Tenerife y que aún no se ha
hecho después de 5 meses.
6ª semana
¡Ya
estamos todos juntos de nuevo! Sofi y Yaz estaban fuera de la isla y
con ellas nos pusimos a organizar la temporada, algo muy importante para
intentar que no nos coja el toro. Además, debemos programarnos teniendo
en cuenta que algunos de nosotros lo más probable es que estemos de
vacaciones fuera de la isla en Navidad, así que hay que aprovechar bien
el tiempo en estos 3 meses y medio.
 |
La programación de la temporada es fundamental
|
El
set del Juego del Robot ya está de camino desde la Península y según la
organización llegará la próxima semana, aunque lo más probable es que
sea la siguiente (algunos equipos de la Península ya lo han recibido).
Mientras tanto, vamos elaborando el guion de nuestro videotutorial sobre
las Reglas del Juego (¡ya llevamos 10, desde Nature´s Fury!).
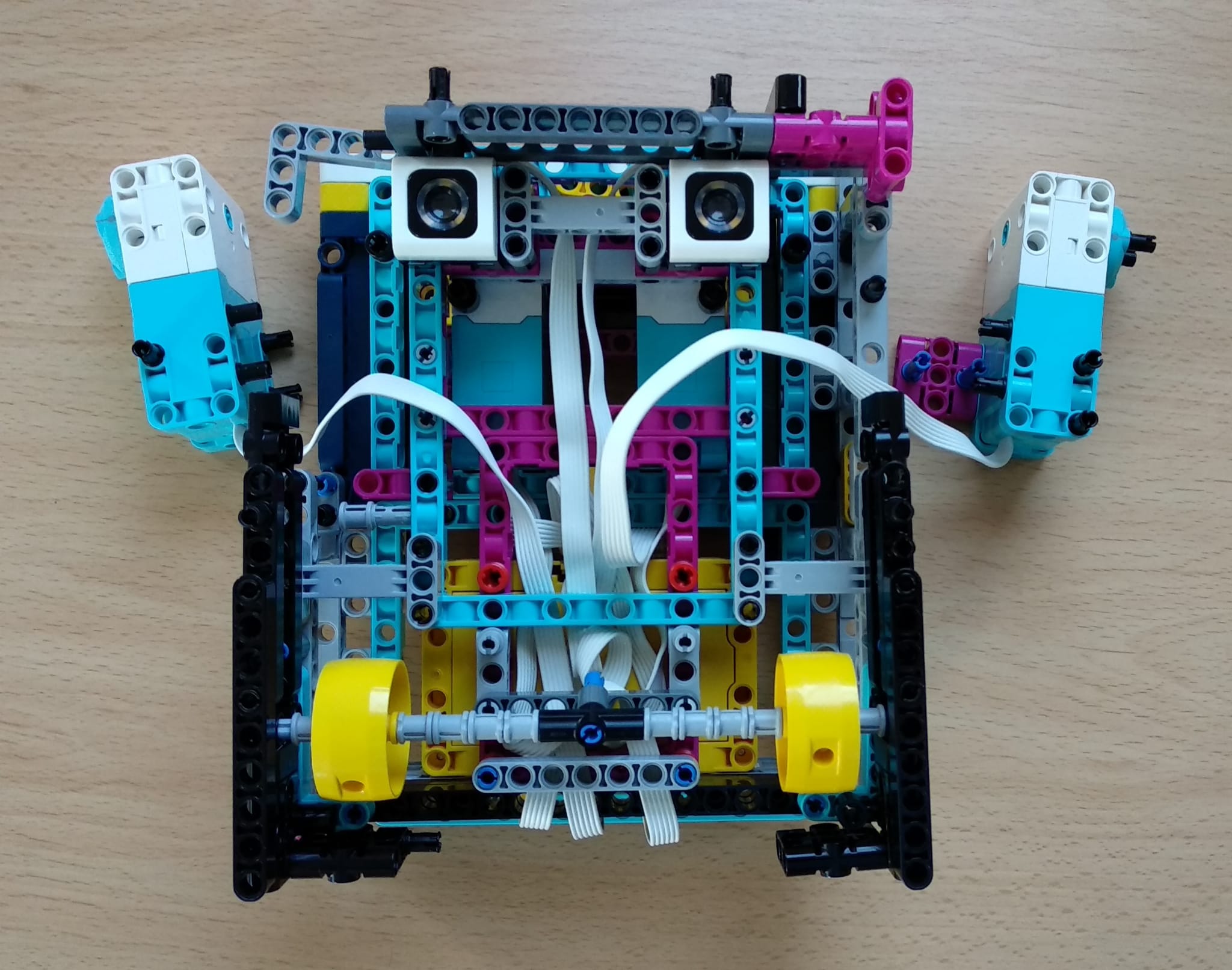
También
tenemos que fusionar ambos diseños del robot SPIKE y para ello tomamos
lo mejor de ambos, con algunas mejoras extras, como aumentar la
distancia entre sensores de color, en caso de que haya que cuadrarse con
alguna línea.
7ª semana
El
Instituto Tecnológico y de Energías Renovables de Tenerife publica la
noticia sobre su colaboración con nosotros para probar nuestros bloques
de E=Wall. ¡Estamos súper ilusionados!
Nos
hemos puesto en contacto con LEGO a través de Twitter para que mejore
algunas piezas que suelen romperse con el uso, sobre todo haciendo
robots en FLL 😅
Hemos
conseguido hacer un robot tipo CORE a partir del prototipo que nos
parecía mejor de los 2 que habíamos hecho. Aumentamos la distancia entre
sensores, mejoramos la sujeción de las ruedas de tracción (las mismas
de siempre) y ordenamos las conexiones de motores y sensores, para
seguir con las mismas letras para los puertos de los motores tractores y
los de accesorios. Finalmente nos quedó algo parecido a Quabot, pero en
versión SPIKE Prime (Quabot Model S).
También
desarrollamos una primera estrategia para el Juego del Robot, con 4
salidas desde ambas Zonas de Lanzamiento. Ya veremos luego cómo queda
cuando tengamos el set armado, esperamos que la próxima semana.
Tenemos
casi lista la encuesta como apoyo a nuestro proyecto de innovación y
hemos estado preparando el guion de las Reglas del Juego del Robot, para
hacer el video en cuanto tengamos listo el Terreno de Juego.
8ª semana
Ya tenemos nuestra encuesta colgada en las redes. Pueden verla en este enlace:
Nuestro
robot está listo para empezar a programarlo con el nuevo set de juego,
cuando llegue, porque aún no lo tenemos. En la Península, sin embargo,
ya lo tienen desde hace 2 semanas.
Al
terminar el robot y probar los motores de tracción, nos dimos cuenta de
que al mover a mano las ruedas, éstas no giraban igual (la izquierda se
frenaba antes). Esto lo vimos también al probarlos al aire con el
programa AC_DC (aceleración - desaceleración) y la rueda derecha giraba
aproximadamente media vuelta menos que la izquierda. Esto hace que el
robot se desvíe a la derecha.. Por ello tuvimos que cambiar ambos
motores para que quedaran emparejados y evitar ese desvío lo máximo
posible. Otra forma de evitar ese desvío es ayudarnos del girosensor.
En
cuanto a la estrategia, estamos viendo cómo gestionar las Unidades de
Energía de la mejor forma para no tener que llevarlas de una Casa a otra
y luego descargarlas en los modelos correspondientes.
9ª semana
¡Por
fin llegó el set, 3 semanas después de haber salido de la Península! El
miércoles 28 lo trajo la empresa TIPSA, después de haberlo llevado del
PCTT a la dirección de nuestro patrocinador en Gran Canaria por
equivocación.
El mismo viernes lo armamos en 2 horas y media 💪
Y este es nuestro toque creativo (la mejor idea que han tenido los diseñadores del juego, poder personalizar uno de los modelos):
Sólo
tuvimos una incidencia: uno de los marcos más grandes llegó deformado.
Menos mal que teníamos repuesto, aunque de otro color.
En
cuanto al robot, hemos conseguido calibrar la función AC_DC para que
sea precisa y recorra una distancia real aprox igual que la marcada, con
un error de +/- 1 cm. Otro problema que ha surgido es que con la última
versión del soft y firmware de SPIKE, el sensor de color derecho no
funciona en modo reflejo, pero sí en modo color, concretamente al
localizar una línea negra (no se mueve el robot). Después de un largo
troubleshooting descartamos el hub y el sensor, al probar con otros hubs
y sensores. Llegamos a la conclusión que la última versión 2.0.8 estaba
dando ese fallo. Instalamos la versión 1.3.4 y funcionó perfectamente.
Se informó del problema a LEGO.
Consultamos con nuestros amigos los Legotronic Beavers, y no han tenido ese problema usando Scratch.
La
encuesta del proyecto va muy bien. Tenemos ya 45 respuestas ¡Muchas
gracias por la colaboración! Hemos empezado a analizar los resultados
para ver qué problemas podemos ir investigando.
10ª semana
Hemos
encontrado una alternativa para que el sensor funcione en modo reflejo
para detectar una línea negra: usar wait_until en lugar de un bucle
while, como se puede ver en la imagen.
LEGO ha contestado a nuestra consulta pidiendo más información sobre el hard y soft que usamos para dar con el error.
Hemos
terminado de grabar el video del tutorial de las Reglas del Robot para
subirlo a Youtube y así ayudar a otros equipos a entender el desafío de
esta temporada. También nos ayuda a nosotros a sacarle todo el provecho
de cara a la estrategia. Aquí pueden verlo:
Y, como siempre, lo pasamos genial 😅
Y parece que está sirviendo de ayuda:
En
cuanto al proyecto de innovación, hemos identificado 3 problemas que
investigaremos en paralelo, y de ahí nos centraremos en nuestro problema
principal.
11ª semana
Dedicada
completamente a nuestra jornada de puertas abiertas, que tuvo mucha
aceptación, sobre todo entre nuestros incondicionales de La Jaca
Robótica.
 |
No podía faltar nuestro equipo FTC con su robot Pepe
|
LEGO
ya nos contestó por mensajería de Twitter e Email, pidiendo más info
sobre el dispositivo y SO usados, además de la versión del software de
SPIKE y un video mostrando el fallo.
12ª semana
Este
viernes tuvimos la oportunidad de entrevistar a un experto en paneles
fotovoltaicos del ITER (Instituto Tecnológico y de Energías Renovables),
quien nos aportó datos muy interesantes ¡Muchas gracias Carlos!
También estuvimos haciendo algunos experimentos sobre aprovechamiento de energía.
El
robot sigue en marcha, diseñando y fabricando el accesorio de la
primera ruta, con el que pensamos hacer 5 misiones. Es importante
comprobar que el robot llega con precisión a cada uno de los modelos de
misión y verificar las dimensiones que necesitamos para los accesorios,
sin complicarlos demasiado.
13ª semana
Hemos
tenido una reunión muy importante en la que hemos debatido sobre la
organización del equipo y el reparto de tareas. Si existe algún
conflicto dentro del equipo debemos hablarlo cuanto antes, durante la
misma sesión, para que proyecto y robot puedan seguir adelante sin
problemas.
Nos
decidimos por uno de los problemas con más viabilidad y más importancia
para nuestra sociedad. Seguimos investigando buscando información en
diversas fuentes.
Algunos
de los componentes les cuesta un poco más entender la programación del
robot, al ser además en Python, no en Scratch, pero nos encargaremos de
que todos le vayan cogiendo el tranquillo.
Noviembre de 2022
14ª semana
Para
que todos sepamos cómo se va programando el robot y entendamos cómo es
Python, Kabir nos explicó el programa y las funciones (myblocks) usadas
en la primera salida.
De
la primera ruta nos queda añadir un brazo al motor A para recoger la
unidad recargable y las 3 unidades de agua. De esa forma podemos llegar a
conseguir ¡140 ptos!
Después de 5 semanas esperando a que LEGO nos dé una solución con el problema de software, nos dicen esto:
"Para
asegurarnos de que es el puerto F el que está defectuoso, cree un
programa muy simple con bloques de palabras de Scratch en lugar de
Python. Si el sensor en el puerto F funciona con el
programa Scratch, entonces hay un error de programación en Python, con
el que no podemos ayudar. Si el sensor tampoco funciona, usando bloques
de palabras de Scratch, entonces envíe el
programa y un video que muestre el error."
Hicimos
la prueba con Scratch y va perfecto, como imaginábamos. Pero seguimos
con el mismo problema. Si Python está integrado en la SPIKE App, como
Scratch, ¿cómo que no pueden ayudar? Debería solucionarse con una nueva
versión de la App, ya que en la versión 1.3.4 funciona perfectamente.
15ª semana
Hemos solicitado a LEGO
que pruebe nuestro programa para comprobar el fallo que nos sale. Así
lo hicieron pero no les da error. Puede que lo hayan comprobado una sola
vez; a nosotros a la primera hay veces que va bien, pero las siguientes
no.
Hemos
pedido a varios equipos, que programan también con Python, que
comprueben nuestro programa con nuestra configuración de sensores y
motores, a ver si les pasa lo mismo. Esperamos noticias 😃
En el proyecto seguimos documentándonos sobre el problema y la solución elegidos, de momento, y consultando a expertos.
En
el Juego del Robot tenemos casi lista la primera ruta, que va de la
Casa Azul a la Roja, a falta de ajustar programación y terminar de
construir la cesta que recoge la batería recargable y las 3 unidades de
agua. También tenemos bastante avanzados los accesorios de la segunda
ruta, que sale de la Casa Roja y vuelve a ella.
16ª semana
Hemos diseñado nuestras nuevas sudaderas y van a quedar muy chulas!
En el robot tenemos listo el accesorio de la primera ruta, aunque seguro que llevará más cambios y ajustes. En la segunda ruta hemos completado el accesorio para sacar la Unidades de la Planta de Energía.
Tenemos una incidencia con el Aerogenerador, como otros equipos: al empujar el pulsador rojo a tope el mecanismo se queda atascado (según como se haga), como se ve en la imagen.
Creemos que es un problema de diseño, no de montaje, ya que lo hemos revisado varias veces. Parece que la fricción en el sistema de engranajes es mayor que el peso del contrapeso (rueda del extremo izquierdo). Afortunadamente nuestro robot lo empuja sin que se atasque, aunque a veces no caigan las 3 Unidades dentro de la cesta. 😅
17ª semana
Hemos aclarado algunas cuestiones en cuanto a organización del trabajo y reparto de tareas para que todos aportemos al proyecto y al robot, dedicando más tiempo a lo que se nos da mejor y transmitiendo esos conocimientos al resto del equipo.
En el Proyecto, repasamos el problema que queremos resolver para centrarnos en una solución viable y asequible con los medios y materiales disponibles.
En el Juego del Robot seguimos con el diseño y construcción del accesorio de la 2ª ruta: ya funciona bien la parte que recoge las 3 UE de la Central Eléctrica y seguimos mejorando la que deja las UAL (Unidades de Agua con Lazo) en los ganchos y el embalse, y libera la UE de la Central Hidroeléctrica.
Nuestro método, como el de otros equipos, es el de diseñar y construir las partes del accesorio para probarlas individualmente en cada modelo y luego unirlas de forma que cada parte no interfiera en otras misiones durante el recorrido de cada ruta. Procuramos no pasar 2 veces por el mismo sitio para ahorrar tiempo, aunque en este desafío sí que lo hacemos en distintas rutas.
Hemos dado por fin con la causa del atasco del aerogenerador: en el paso 12 de las instrucciones de construcción habíamos puesto 2 pines grises en vez de negros, lo que hacía que las 2 vigas se movieran entre sí y el engranaje que va acoplado a ellas oscilara lateralmente, frenando así el sistema. Esperamos que nos perdone la diseñadora del modelo, que además es española. 😅🙏
Esto lo comunicamos a la comunidad FLL a través del foro de entrenadores y las redes sociales, por si su problema del atasco del aerogenerador era el mismo que el nuestro.


En cuanto al problema de software del SPIKE, LEGO nos ha dicho, después de pedirnos el programa que usamos y el fichero log.txt, que actualicemos el hub a la nueva versión 3 y luego revertir a la 2.0.8, ya que en la nueva versión no hay Python de momento. Así lo hicimos, pero ahora tenemos el hub inservible ya que nos ha dado este error al intentar volver a la versión anterior:

Seguimos a la espera de que el servicio técnico de LEGO nos conteste.
Diciembre de 2022
18ª semana
Hemos vuelto a hacer brainstorming sobre las ideas del proyecto, ya que lo que tenemos no lo vemos del todo viable, aunque todo es parte del proceso y nos ayudará a conseguir una solución innovadora para mejorar las condiciones de vida de nuestra comunidad. Hemos aprovechado antes de que Sofi se vaya fuera de la isla a ver a su family. Volverá dentro de 5 semanas, pero contactará con nosotros de forma telemática cada vez que nos reunamos.
En el robot tenemos lista la segunda ruta, a falta de ajustes, como siempre, y de darle más velocidad. También hemos decidido participar 3 componentes en cada partida (1 en la Casa Azul y 2 en la Casa Roja), ya que en la Casa Azul sólo tenemos la primera salida y ya no vuelve a ella.
Finalmente conseguimos revertir el hub a la versión 2.0.8 gracias al método y herramientas de la web Pybricks.com:
https://dfu.pybricks.com
No era posible con las instrucciones de LEGO (no sirven para Windows), que no llegó a contestarnos. Suponemos que están muy liados con el lanzamiento de la nueva SPIKE 3, que no deben usar los equipos FLL (con Scratch) ya que los programas ya hechos en la ver 2 no sirven en la 3. Python no existirá en la 3 hasta la próxima temporada.
Seguiremos con el bug en la ver 2, evitándolo en lo posible usando otros comandos para la misma función.
19ª semana
Nos hemos reunido online con nuestros amigos de FSingenium Team. Intercambiamos ideas de proyecto y explicaciones del diseño del robot. Ellos incluso nos hicieron una demostración de partida con un robot bestial, como siempre, prácticamente terminado. Pasamos un rato genial con unos chicos y chicas muy majos. ¡Gracias por el buen ratito!


En el proyecto hemos dado un giro drástico a la problemática que estamos analizando. Esperamos que esta vez sea la "refinitiva".
En el robot empezamos a diseñar el accesorio de la tercera y última ruta. Además estamos viendo cómo hacer más rápidas las otras 2, ya que se llevan 80 segundos la primera y 38 la segunda. Nos quedarían 30 s para los 2 cambios de accesorios y la tercera ruta.
20ª semana
Parece que en el proyecto hemos dado con un problema al que podemos dar una solución viable e innovadora. Pero debemos asegurarnos de que no existen ya soluciones como la nuestra, lo que suele ocurrir a menudo.
El robot sigue avanzando, ajustando la 2 primeras rutas y construyendo el accesorio de la tercera y última. Hemos conseguido ahorrar unos 6 segundos en las 2 primeras, acelerando el robot donde se puede y eliminando las pausas antes y después de cada aceleración-deceleración (AC_DC).
Hemos visto que hay que procurar usar el robot sólo cuando tenga la batería por encima del 80%, para que todas las rondas salgan más o menos igual (lo que nos pasaba con el EV3).
21ª semana
Seguimos
trabajando a tope, adelantando todo lo posible antes de fin de año. Por
ello nos reuniremos también la próxima semana los días que podamos.
Nuestro entrenador Tony tuvo el
miércoles sesión de formación junto a los demás entrenadores de FLL
Canarias, impartida por nuestra querida Zule, que ha pasado por todos
los roles posibles en este clasificatorio. Se barajan como fechas más
probables el 4 y el 11 de marzo; si se hiciera el 4 tendríamos la
posibilidad de celebrarlo en el Aulario de Guajara de la ULL, el mejor
lugar.
El proyecto creemos que va bien encaminado y estamos pendientes de obtener feedback de varios expertos.
El
robot tiene casi listos todos sus accesorios, a faltar de terminar el
de la tercera ruta. Sólo nos queda programar esta última ruta y ya
podremos empezar a practicar rondas, al menos 50 😅
 |
Probando la última ruta
|
Nuestros mejores deseos en estas fechas para disfrutarlas en familia
22ª semana
Termina un gran año para nosotros, y esperamos poder seguir disfrutando de la FIRST LEGO League aún más en 2023. Deseamos que así sea para todos y sigamos innovando por un mundo mejor.
Esta
semana aprovechamos para reunirnos 3 días para darle un empujón al
proyecto y terminar de programar la partida del robot. Haciendo ajustes
a la programación hemos conseguido rebajar el tiempo de las rutas casi
20 segundos, por lo que en total nos sobran 25 segundos para los 2
cambios de accesorios.
El primero de ellos es el que nos va a costar
más, ya que en la primera ruta el robot llega a la Casa Roja cargado con
7 Unidades de Energía (incluida la bandeja), el Dinosaurio, la Unidad
Recargable, 3 Unidades de Agua y el Camión Cisterna con 3 Unidades de
Combustible; y a continuación hay que colgarle las 3 Unidades de Agua al
siguiente accesorio. El último accesorio lleva el Camión con sus 3
Unidades de Combustible y 8 Unidades de Energía. Pero con mucha práctica
le cogeremos el tranquillo, para hacer las transiciones como en la
Fórmula 1. 💪😜
 |
Digitalizando el último accesorio en Studio
|
También
estamos viendo cómo ahorrar tiempo en los cambios y hacer como en el
EV3: sólo apretar un botón para que vuelva a salir. En el SPIKE hay que
apretar el botón central para parar el programa anterior, uno de los
laterales para pasar al siguiente programa y el central para ponerlo en
marcha de nuevo.
Después
de 8 meses, y justo el último día hábil de este año, el PCTT nos
comunica que nos ingresarán el importe de la inscripción en el mundial
de Houston, durante el mes de enero de 2023. Más vale tarde
que nunca y les agradecemos el esfuerzo que han hecho para poder
ayudarnos con dicho gasto.
Enero de 2023
23ª semana
Empezamos bien el Nuevo Año diseñando un prototipo de nuestro proyecto de innovación, o al menos intentándolo 😅
Y terminando de digitalizar el primer y tercer accesorios.
Empezamos
a ensayar el primer cambio de accesorios y encajar todo nuestro
equipamiento en una de las áreas de lanzamiento, para poder obtener los
20 puntos de la inspección.
24ª semana
Seguimos haciendo pruebas de nuestro prototipo usando el software Tinkercad y la impresora 3D, mediante ensayo-error para asegurarnos de que la impresión definitiva tendrá las medidas que necesitamos.
Y por fin empiezan las primeras prácticas de partidas completas, para entrar en tiempo poco a poco, sobre todo con el primero de los 2 cambios de accesorios, el más complicado al tener que mover muuuuchos modelos de misión. 😅
25ª semana
Nos parece increíble haber conseguido el primer máximo de 400 ptos, dentro de tiempo, el segundo día de prácticas en el Juego del Robot. Aún así, hay unas cuantas cosas que mejorar, sobre todo el primer cambio de accesorios.
También hemos ensayado la Inspección del equipamiento, que este año es menos complicada al caber todo sin problema en una de las áreas de inicio. En comparación con años anteriores, el tamaño de los accesorios se ha reducido bastante, tal vez por el tipo de misiones. Aún así, en Ingeniería y en todo los demás, la simplicidad es la clave. 💪
El
aerogenerador se volvió a atascar y lo solucionamos limpiando el
pulsador por debajo y la pieza donde se apoya. El pulsador es este:
En cuanto al proyecto, continuamos con el diseño y el ensayo-error del prototipo, comprobando si nuestras hipótesis son correctas y si no, hacer los cambios necesarios, según el tiempo y los recursos disponibles.
Además, vamos viendo ideas de presentación de ambos proyectos, cuanto más creativas y divertidas mejor 😅
26ª semana
Continuamos las prácticas de rondas y mejorando programación y accesorios. El aerogenerador sigue dando problemas, quedando fuera de la bandeja del robot la última unidad de energía. Seguiremos mejroando el accesorio para que entren todas la mayoría de las veces, si no todas. 💪
También vino Francis Alemany, el padre de Samu, a hablarnos sobre su experiencia como bombero y técnico de emergencias del 112. Una charla muy útil e interesante ¡Gracias Francis! 😍
Febrero de 2023
27ª semana
Las
prácticas del Juego del Robot siguen adelante, registrando la
estadística en una tabla excel. Intentaremos hacer al menos 50 rondas
antes de la FLL Canarias (4 y 5 de marzo). También hemos empezado a
preparar los guiones de las presentaciones del Diseño del Robot y
Proyecto de Innovación. La idea es aprovechar la semana de Carnaval para
hacer nuestra microFLL o ensayo general delante de nuestros familiares,
y así tener un feedback sobre qué mejorar de cara al gran día.
 |
GAME OVER!
|
 |
Lo que faltó para los 410
|
Estamos
pendientes de hacer unas pruebas en el ITER (Instituto Tecnológico y de
Energías Renovables) que nos ayuden a defender nuestro proyecto. Muchas
gracias al personal que allí trabaja por ayudarnos en nuestra labor.
Este
sábado se celebró el primero de los 32 clasificatorios en Girona.
Durante este mes y principios de marzo se irán celebrando cada fin de
semana. ¡Mucho ánimo y suerte a todos! 💪😍
28ª semana
Una semana muy movida,
sobre todo por las pruebas que hemos hecho para ir confirmando nuestras
hipótesis del proyecto de innovación. Damos mil gracias al ITER por su
colaboración en parte de las pruebas, fundamentales para seguir
avanzando. Como esta con una cámara térmica:
En
el juego del robot estuvimos practicando rondas, con la inspección
incluida antes de cada una de ellas. Ya llevamos 48 partidas
registradas, con buenas medias diarias.
Nos
reunimos online con nuestros amigos del equipo catalán Como Tu Vulgues
(Como tú quieras), y nos contamos nuestros proyectos y diseño del robot.
¡Fue genial! Habríamos estado toda la mañana hablando con ellos.
Se
habló de un posible máximo de 415 ptos, suponiendo que se pudiera
colocar el coche híbrido con su unidad sobre un soporte y que en su
capot sostuviera una unidad de energía que tocara la tolva, pero que al
mismo tiempo quedara dentro del área de la batería recargable. Como
muestra la imagen:
Pero
según como interpretamos el texto de los requisitos de la misión, la
unidad debería estar al menos parcialmente dentro de la tolva, y ya no
podría estar al mismo tiempo completamente dentro del área de la batería
recargable.
29ª semana
Una
semanita intensa terminando los guiones de presentación de proyecto y
robot, para hacer nuestra microFLL o ensayo general el lunes 20 por la
tarde. Debemos simplificar los guiones al máximo para que las
presentaciones sean claras y amenas sin tener que hablar rápido para
entrar en los 5 min de tiempo límite.
También
estamos ultimando flyers y roll-up para difundir nuestros proyectos
antes de la FLL Canarias, el sábado 4 de marzo. La buena noticia es que
seremos 21 equipos Challenge y 34 Explore, ¡casi ná! De esta forma, al
llegar al mínimo de 20 equipos, se pueden clasificar 2 para la Gran
Final.
30ª semana
Ya en la recta final...¡sólo queda una semana para el gran día!
Empezamos
esta semana de Carnaval con un ensayo general mostrando a familiares y
amigos nuestros proyectos, incluyendo 4 partidas del Juego del Robot.
Seguimos
reuniéndonos para terminar el diseño de los flyers, seguir preparando
las memorias y realizar las últimas pruebas a nuestro prototipo del
proyecto de innovación HOPES.
Y aquí presentamos el flyer para difundir nuestros proyectos:
El
viernes nos entrevistaron en Radio Sur Adeje para hablar de ellos y de
paso animar a todos los oyentes a que acudan a la FLL Canarias, que se
celebrará el sábado 4 de marzo, de 9 a 15 h, en el edificio IACTec y el
colegio Hispano Británico, Parque Tecnológico y Científico Las Mantecas,
La Laguna.
Y por la noche a disfrutar todos juntos de varias partidas de bolos 💪😄
¡Y por fin llegó el gran día! Aunque el viernes nos reunimos para hacer los últimos ensayos.
 |
Muy unidos, como siempre. A partir de aquí todo fluye.
|
Nos
esperaba una mañana de sábado llena de diversión y nervios, al menos
hasta que terminó la 3ª ronda del Juego del Robot. La verdad es que
Spiky se portó mejor de lo esperado. Menos mal que pudimos practicar
antes de la 1ª ronda, donde nos dimos cuenta de que una de las piezas
tropezaba en el modelo de la Red Inteligente. Eso hubiera arruinado toda
la primera ruta.
 |
Preparando la inspección de la primera partida ¡qué nervios!
|
 |
Entrevista a Sofi sobre la primera ronda
|
La
primera ronda fue bastante bien, con una puntuación de 345, con Samu y
Kabir como técnicos en la casa roja. La segunda fue la peor, 190, porque
la cesta que recoge las UAL y la unidad recargable tropezó con el borde
del embalse y el robot se bloqueó, perdiendo todo lo recogido hasta el
momento. Los técnicos fueron Eli y Sofi. Y la 3ª fue la mejor, en la que
repitieron Eli y Sofi, consiguiendo 370 ptos. De no ser por no
conseguir la misión de la red inteligente y caerse por el camino una
Unidad de Energía, habrían conseguido el máximo de 400.
 |
¡Máxima concentración!
|
 |
Hiper-dino conduciendo nuestro robot Spiky 😂
|
 |
Estamos muy agradecidos a tod@s l@s voluntari@s
|
Se pueden ver las partidas y ceremonias en el siguiente link
Nuestras partidas se ven en los min: 57:46, 2:19:30 y 3:11:00
Este fue el ranking final del Juego del Robot:
Este
año las partidas de robot eran en el edificio del IACTec y el resto de
actividades en el Colegio Hispano Británico, incluidas las ceremonias
bajo un sol de justicia. Sí, tuvimos un tiempo demasiado bueno para ser
La Laguna. Un inconveniente añadido fue que la sala de PIT para
practicar con el robot estaba en el Colegio, por lo que había que correr
para llegar a tiempo a las sesiones reservadas, después o antes de cada
partida oficial.
También
tuvimos que correr, y mucho, en cuanto terminamos la 1ª ronda, para
llegar a tiempo a la sala de jueces a exponer nuestros proyectos, ya que
la ronda era a las 10:00 y las presentaciones a las 10:15 h, y había
una distancia de más de 500 m y 3 tramos de escalera. Llegamos con la
lengua fuera 😅 Además,
en esa carrera, al salir de la sala del Juego del Robot nos encontramos
con una voluntaria árbitro que acababa de tener un esguince, y nos
quedamos con ella para ayudarla hasta que vinieron a asistirla. 😍
 |
Presentando el Diseño del Robot ante los jueces
|
Cuando
ya terminamos la última partida y estábamos relajados con "todo el
pescado vendido", aprovechamos a visitar una feria sobre Ciencia y
Tecnología que montaron en el mismo cole.
Y luego llegó por fin la ceremonia de entrega de medallas y premios.
Diez meses de duro trabajo han dado sus frutos.
¡¡CLASIFICADOS PARA LA GRAN FINAL NACIONAL EN CARTAGENA (MURCIA) EL 25 DE MARZO!!
La cuestión no es ganar un torneo, sino poder seguir compartiendo nuestras experiencias con los demás y divertirnos haciéndolo. Felicitamos
a todos los equipos a nivel nacional, organización y voluntarios por
seguir haciendo posible esta Fiesta de la Ciencia y la Tecnología.
Además, en esta edición de la FLL Canarias hay 2 plazas para la
Gran Final, por lo que que nos acompañará el equipo Skynet 2, del
Colegio Casa Azul de La Orotava. 👏👏
Pueden leer el artículo en prensa:
Y el reportaje en Canarias 2.0 (min 21:30) aquí:
32ª semana
Aún
con la emoción de la FLL Canarias, nos reunimos para analizar las
rúbricas de los jueces, con ayuda de los videos de las presentaciones.
También recurrimos al VAR del Juego del Robot 😂 (Videos de Actuación
del Robot) para intentar corregir los fallos de cara al Nacional, y nos
pusimos a practicar rondas para llegar a las 100 registradas. Nos quedan
40 y este sábado pudimos hacer 20, con una buena media.
 |
| Reseteando el terreno de juego a toda velocidad |
El
viernes hicimos un Meet con el equipo paraguayo MbareteBot,
clasificados ya para el Mundial en Houston ¡Enhorabuena! Más de una hora
compartiendo experiencias y aconsejándoles sobre diversos temas en el
Mundial. ¡Son geniales! Les deseamos mucha suerte en el World Festival.
33ª semana
Últimos
ensayos intentando mejorar las presentaciones de la FLL Canarias.
También hemos completado las 100 partidas registradas con las 20 que nos
quedaban por hacer, esta vez usando un tapete y un aerogenerador nuevos
que nos prestó un equipo local para poder preparar la Gran Final. 💪💪
Y no pueden faltar los obsequios para nuestros compis en el evento.
¡MUCHA SUERTE Y ÁNIMO A TODOS LOS EQUIPOS QUE DISFRUTARÁN COMO NOSOTROS DE LA GRAN FIESTA EL PRÓXIMO SÁBADO 25 EN CARTAGENA!
Lo que nos emociona es reencontrarnos con equipos conocidos y hacer nuevos amigos 😍
34ª semana
Un
finde super intenso, en el que hemos disfrutado sobre todo de un
reencuentro con amigos. Muchos de ellos no los habíamos visto aún en
persona. La Gran Final se celebró en la Escuela Técnica Superior de
Ingeniería Industrial, de la Universidad Politécnica de Cartagena. Un
edificio muy bonito con 2 patios enormes, para poder albergar, en uno a
los 47 stands delos equipos participantes y en el otro las ceremonias de
apertura y clausura.
Spiky y Friky acudieron bien protegidos por Dino y en modo avión 😅
El listado de equipos participantes es el siguiente:
La
noche anterior llegamos a las 9 al hotel, un poco tarde para ponernos a
ensayar como habíamos planeado, así que decidimos hacerlo entre la
ronda de práctica y la presentación a los jueces (20 min max).
Finalmente nos salieron bastante bien las presentaciones, a pesar de que
Sofi había pasado una mala noche con más de 39 de fiebre (algo parecido
a lo que le pasó en la FLL Canarias). Los jueces fueron muy amables y
atentos, aunque al ver las rúbricas comprobamos que el diseño del robot
no lo valoraron tan bien como creímos, sobre todo el hecho de empezar de
cero con SPIKE y Python desde mayo del año pasado.
La
ronda de práctica no empezó del todo bien al perder tiempo en el inicio
por una confusión con la señal de salida; aún así hicimos 325 ptos. La
primera ronda oficial fue la mejor, con la que estuvimos en cabeza hasta
la 2ª ronda, cuando nos superaron los Beavers. La 3ª fue la peor, al
tropezar el robot con el acumulador en la última salida. Aún no hemos
encontrado explicación a esto.
Finalmente,
en el enfrentamiento entre Legotronic Beavers y FSingenium, le dieron a
éstos por válida la misión de la Red inteligente, a pesar de no estar
completamente levantada. El modelo nos había funcionado bien a nosotros
justo la ronda anterior. Eso los puso en primera posición, Beavers
segundos y nosotros terceros.
Pero FIRST
LEGO League es mucho más que robots y la convivencia con otros equipos
es lo más importante, como por ejemplo con los castellonenses Com Tu
Vulgues y los alicantinos Roboluti_ON, que por fin pudimos ver en
persona. Los primeros nos regalaron firmada su primera bandera.
Y
por fin llegó la ceremonia de entrega de premios que se terminó pasadas
las 8 de la tarde, ya de noche, después de una sesión de DJ, con la que
bailamos como si no hubiera un mañana.
Sabíamos que teníamos al menos el Tercer Premio al Comportamiento del Robot
Pueden ver nuestra mejor partida a partir del min 3:05:00 de la retransmisión en directo:
Donde también se pueden ver las ceremonias
Pero lo que no sabíamos es si llegaría algo más, ¡y vaya que sí!
TRES AÑOS CONSECUTIVOS EN EL PÓDIUM NACIONAL, TAMBIÉN EN EL JUEGO DEL ROBOT
Este reconocimiento nos da plaza en
el Open Internacional de California, del 12 al 14 de mayo, pero con
unos gastos de unos 1500 € por cabeza como mínimo, que tenemos que ver
de dónde los sacamos.
¡Enhorabuena
a todos los equipos participantes, voluntarios y organización por el
esfuerzo realizado para poder celebrar esta fiesta!
Estos son los reconocimientos otorgados en la Gran Final
En el siguiente enlace pueden ver un resumen de la jornada:
Al
día siguiente aprovechamos para dar una vuelta por Cartagena junto con
nuestros amigos de Roboluti_ON, y aprovechamos para visitar el Museo
Nacional de Arqueología Subacuática, en el que pudimos ver la evolución
de la construcción naval a lo largo de la Historia.
Y así volvieron Spiky y Friky, con acompañamiento adicional 😉
37ª semana
Seguimos
sin tener confirmación por parte de la organización del Open de
Marruecos, ya que imaginamos que estarán esperando a que países como
Reino Unido celebren sus finales; en este caso será el próximo sábado
22. Así que toca armarse de paciencia.
Nosotros mientras tanto seguimos trabajando en las traducciones y mejorando el robot. No nos queda otra 😅
38ª semana
¡Estamos
por fin inscritos en el Open de Marruecos! Ha sido una semana bastante
estresante hasta que conseguimos reservar los vuelos y pagar la
inscripción, que incluye el alojamiento en pensión completa. Volaremos a
Marrakesh el miércoles 17 de mayo, haciendo escala en Valencia, y
volveremos el 21 de mayo, con 2 escalas (Málaga y Madrid) 😅 Menos mal
que estamos al lado 😂
Además
del torneo en sí, hay también previsto un tour por la ciudad para los
68 equipos participantes, que venimos de los 5 continentes.
¡Será una experiencia genial!
Otro
notición es que en el World Festival de Houston los equipos españoles
se llevaron 5 premios, quedando nuestros compis FSingenium Team como
campeones del mundo y nuestros otros compis Legotronic Beavers
finalistas y premio al compañerismo (Peer Award), votado por todos los
equipos participantes. Además ambos fueron 1º y 2º respectivamente en el
Juego del Robot.
Ambos llegaron a un empate histórico:
Y en el desempate ganó FSingenium Team 395 -385
En el siguiente enlace pueden ver uno de sus máximos de 415:
Además, durante el torneo se desveló mediante un mosaico espectacular hecho con piezas de LEGO el nombre del próximo desafío
Y ya en la ceremonia se pudo ver el video sobre el desafío:
Y el terreno del Juego del Robot
39ª semana
Seguimos
trabajando a tope con las traducciones para ponernos a ensayar cuanto
antes. Y hemos pedido ayuda a través de las redes sociales para poder
cubrir al menos parte de los gastos (más de 5000 € entre los 7 integrantes de la expedición). Esta es nuestra memoria de patrocinio:
Cualquier
aportación, por pequeña que sea, nos ayudará mucho a darlo todo en este
evento mundial, en el que participaremos 68 equipos de más de 50
países.
¡Muchas gracias!
El
equipo turco Orenda Robotics nos pidió consejo sobre su robot y
proyecto, ya que el domingo 30 tenían su clasificatorio en Estambul
¡Mucha suerte chicos!
Finalmente se clasificaron para su Nacional ¡Enhorabuena!
Mayo de 2023
40ª semana
Estamos
a sólo 2 semanas del Open de Marruecos y seguimos trabajando a tope con
las traducciones y ajustes del robot, porque aún se puede mejorar 😅
El
sábado no podíamos faltar a la jornada de puertas abiertas de nuestros
amigos de La Jaca Robótica, donde lo pasamos genial con todas las
actividades organizadas. Nos recordaba a las antiguas TLP Weekend en las
que hacíamos exhibiciones del juego del robot.
ambién
probamos a Spiky en un ambiente desconocido. De esa forma podemos ver
dónde podría fallar en mesas distintas a la nuestra. Gracias a esto nos
dimos cuenta que se atascaba al dejar las UE en la Fábrica de Juguetes.
Añadimos un par de piezas y listo.
41ª semana
A
menos de una semana para disfrutar de la gran fiesta del Open de
Marruecos ¡qué emoción! Este finde terminamos los preparativos,
incluyendo algunas rondas de robot con algunas sorpresas para el evento y
ensayos de las presentaciones. Seguiremos practicando durante el viaje y
en el hotel para que salgan lo mejor posible. 💪
También
terminamos los regalitos para todos los compis que vendrán de más de 40
países de alrededor del planeta. ¡Qué ganas de vivir de nuevo un evento
mundial!
42ª semana
Estamos
de vuelta de Marruecos, un torneo mundial en el que pudimos disfrutar
de una convivencia con otros 65 equipos de 42 países. Un evento más
internacional que el World Festival y los Open celebrados en EE.UU. En el World Festival, 43 equipos de 108 en total eran de fuera de EE.UU. - Canadá; en el Open
de Razorback (Arkansas) sólo 10 equipos de 80 en total eran
extranjeros; en el Western Edge Open de California, 20 equipos de 75
eran de fuera; y en el WPI Open de Massachusetts, 21 de 80.
El
argumento de la organización es que EE.UU. participa según los equipos
inscritos a nivel mundial. Para nosotros el World Festival es realmente
un Nacional EE.UU. al que se invita a equipos de fuera. Para ser un
Mundial, deberían estar representados todos los países participantes en
FLL Challenge, que son 110.
 |
De camino a Marruecos
|
En el viaje tuvimos que dar un rodeo tanto a la ida (Tenerife Norte - Valencia - Marrakech) como
a la vuelta (Marrakech - Málaga - Madrid Tenerife Norte). Había vuelo
directo pasando por Gran Canaria con Binter, pero los horarios no nos
cuadraban y los precios tampoco. Reservar con tan poco tiempo de
antelación es lo que tiene.
Llegamos
el miércoles 17 para poder descansar y preparar todo antes del jueves
18, cuando había que montar el mini-stand (1,5 x 2 m), donde colocamos
nuestro roll-up como pudimos, ya que habíamos decidido no llevar soporte
metálico para no tener que facturar equipaje por si acaso. Incluso un
equipo de Corea del Sur nos reforzó el soporte q habíamos hecho con
tubos de cartón, ya que llegó un momento que se había doblado por el
peso.
 |
Compartiendo proyecto con otros equipos
|
El hotel Zalagh
Kasbah de Marrakesh acogió todo el evento, excepto las ceremonias. Era
la primera vez que nos hospedábamos todos los equipos en el mismo lugar,
donde además se celebraba el Juego del Robot y se presentaban los
proyectos. Fue algo que nos encantó. El momento más estresante era la
hora del desayuno; aunque nos distribuían por turnos, había demasiada
gente en el comedor.
 |
Zona de PIT
|
 |
Momentos divertidos con el equipo chileno Wall-E volviendo de la ceremoni de apertura
|
También aprovechamos para hacer alguna actividad juntos, como escalada...
O visitar el centro de Marrakesh...
Finalmente
llegó el turno del Juego del Robot, con una partida de práctica y 3
oficiales. Con el afán de mejorar la ejecución de la misión de la Red
Inteligente, modificamos el programa y al descargarlo al robot SPIKY
saltó una actualización del hub. Creemos que no llegó a hacerlo pero
algo pasó con el robot que arruinó las 2 primeras rondas oficiales.
Después de innumerables prácticas, logramos corregir la primera salida
(140 ptos) para intentar una buena puntuación en la tercera y última
oportunidad del domingo 21. Pero en la segunda salida el robot no hizo
un primer giro como debía y no puedo puntuar ninguna misión. En la
tercera salida, los nervios hicieron que no fuéramos capaces de lanzarlo
a tiempo.
 |
Uno de nuestros jueces muy atento antes de la última oportunidad 😅
|
Al
menos en la tercera ronda ayudamos a nuestros compis de GRAT Anunciata
(navarros) a lograr su máxima puntuación de 390, con la que conseguían
un 4º puesto ¡Enhorabuena!. Nosotros finalmente bajamos al puesto 58,
con los 210 ptos de la 2ª ronda. Es una pena, después de un año de
trabajo duro con un hardware y software nuevos para nosotros. Esto nos sirve para descartar la aplicación de LEGO y buscar alternativas como VSCode. Intentaremos diseñar y programar un robot más fiable para la próxima temporada. 💪
Nuestro
entrenador se tiró a la piscina vestido junto al entrenador de GRAT,
para desestresarse y celebrar el final de nuestra participación
Este fue el ranking en el Juego del Robot:
El
sábado 20 después de comer nos tocó presentar nuestros proyectos a los
jueces. Salimos contentos y los jueces fueron amables con nosotros,
aunque estrictos en cuanto al tiempo, porque nos cortaron en la
presentación de robot a los 5 minutos exactos. En el turno de preguntas
pudimos comentar lo más importante que no nos dio tiempo a decir. Aún
así, pudimos comprobar después con las rúbricas lo duros que fueron con
nosotros, al darnos 64 ptos de 104. Aún no entendemos estas
valoraciones. Tal vez no supimos explicarnos bien ¡Al menos aprobamos!
😅
Ese
mismo día por la noche pudimos disfrutar del Friendship event, en el
que compartimos un rato divertido con los demás participantes y los
equipos que querían podían salir al escenario a cantar algo típico de su
país. Nosotros cantamos y bailamos la Macarena, ¿cómo no? 😂
El domingo 21 se celebró la ceremonia de clausura y entrega de premios, donde llegó la sorpresa.
Muy
orgullosos de este premio por lo mucho que significa para nosotros, en
nuestro afán de ayudar a otros equipos a mejorar, transmitiendo nuestra
experiencia.
Profesionalismo Cordial significa esto:
Y aquí el listado de premiados:
Champion's Award:
1st Place:
Team10 - Robotic Engineers - Brazil
2nd Place:
Team32 - Reloaded - Germany
3rd Place:
Team53 - Light Side Robotics - Japan
4th Place:
Team24 - ARRA - Romania
5th Place:
Team2 - Green Power – Morocco
Robot Performance Award:
1st Place:
Team56 - RED - South Korea
2nd Place:
Team53 - Light Side Robotics - Japan
3rd Place:
Team10 - Robotic Engineers – Brazil
Core Values Award:
1st Place:
Team42 - BrainX - Morocco
2nd Place:
Team 59 - greensubmarine - Germany
3rd Place:
Team7 - Volts & Bolts – Kenya
Innovation Project Award:
1st Place:
Team52 - Robotics 2030 - Saudi Arabia
2nd Place:
Team65 - UWR GOOGLY - UAE
3rd Place:
Team75 - GRAT-Anunciata – Spain
Robot Design Award:
1st Place:
Team56 - RED - South Korea
2nd Place:
Team35 - Black&White - Slovenia
3rd Place:
Team28 - KINKO HANAMIYA – Japan
Breakthrough Award:
Team45 - Filadelfia
Black Dragons - Mexico
Team46 -
Gracean Whiz – Philippines
Engineering Excellence Award:
Team13 -
RealTechBot - UK
Team55 -
NROBOGEN – Greece
Rising All-Star Award:
Team31 - SMS
SUPER FLOW - Belgium
Team43 -
Roboroos Rockets – Australia
Motivate Award:
Team60 -
Regoč - Croatia
Team17 -
Powerhouse Trio - Singapore
Gracious Professionalism®
Award:
Team5 -
C’EST LA VIE - Greece
Team34 -
Aldeatrón Robotix - Spain
Team40 -
TECHNOMIND – Nigeria
Coopertition® Award:
Team19 -
Block Pythons - Rwanda
Team63 - 37960 Lazer Robotics -
USA/Massaschussetts
Coach/Mentor Award:
Dag Paul
Menning - Team 59 - greensubmarine - Germany
Snezana
Tomasevic - Team 54 - LEGO Dove - Rwanda
Davy Goorts
- Team 31 - SMS SUPER FLOW - Belgium
Tokunaga
Yasuhito - Team 53 - Light Side Robotics - Japan
Lauri
Vribert - Team 23 - ÖÖKULLID – Estonia
Enhorabuena
a todos los participantes en este Open, que nos ha hecho reflexionar
sobre muchos aspectos en la trayectoria de nuestro equipo. Seguiremos
innovando y siendo profesionales cordiales. 💪😍
 |
Foto de familia con los otros 2 equipos españoles: GRAT Anunciata (Navarra) y LEGOKIDE (Vitoria)
|
 |
Con el equipo Paraguayo BreakingBot
|
¡CON
NUESTRO VIDEO DEL JUEGO DEL ROBOT
DAMOS POR TERMINADA LA TEMPORADA SUPER POWERED, DESEANDO MUCHA SUERTE
AL EQUIPO MONTECASTELO-BOT EN EL OPEN INTERNACIONAL DE AUSTRALIA EN
JUNIO!
SUPER POWERED - 410 - 3 RUNS
¡NOS VEMOS EN MASTER PIECE!
PD:
Vaya subidón nos ha dado este comentario del equipo RED (Corea del
Sur), ganador en el Comportamiento del Robot del Mundial de Marruecos, con su máximo de 415 ptos. ¡Muchas gracias! 😍
Qué
alegría saber que nuestro trabajo está ayudando a la educación en otras
partes del mundo...y nada menos que en Corea del Sur.
Esta fue su mejor partida en el Mundial de Marruecos:
TEAM RED - 415 PTS





.jpeg)
.jpeg)
.jpeg)

.jpeg)



.jpeg)

.jpeg)















%20ITER%20en%20Twitter_%20_%F0%9F%93%B0%23ITER%20colabora%20con%20Aldeatron%20Robotik%20en%20el%20desarrollo%20t%C3%A9.png)



%20_%20Twitter%20%E2%80%94%20Mozilla%20Firefox.png)
.jpeg)
.jpeg)







.jpeg)




















































.jpeg)
































































































No hay comentarios:
Publicar un comentario