

¡Hola
a todos! Esperamos que estén todos bien y hayan empezado el curso sin complicaciones. Esta es nuestra novena temporada en la FLL, en
la que tenemos cambios importantes. Después de una temporada CITY SHAPER increíble e inolvidable en todos los aspectos, despedimos con un fuerte abrazo a cuatro de nuestros componentes: Luis, Rocío, Álex y Héctor. Aunque por supuesto seguirán vinculados al proyecto E=WALL.
El equipo lo componemos Laura (16), Yazmín (15), Kabir (13) y Sofía (12), que estudiamos en centros
educativos de Adeje, Arona y San Miguel, por lo que nos reuniremos los viernes por la tarde y sábados
por la mañana en la papelería y academia Edukatrón Robotics, en Las Chafiras (Tenerife Sur). ¡Les esperamos!
El nuevo desafío consiste en procurar que seamos más activos, que nos movamos más y resolver problemas que estén impidiendo o dificultando la actividad física, ya sea jugando o haciendo deporte de forma más profesional.
En cuanto al Juego del Robot este es el nuevo Terreno y Misiones:
 |
Contador de Pasos
|
 |
Canaleta de Boccia y Teléfono Móvil
|
 |
| Teléfono Móvil. Campo y Canaleta de Boccia |
 |
Compartidor de Boccia y Canasta de Baloncesto
|
 |
Banco
|
 |
Tobogán, Larguero y Neumáticos
|
 |
Máquina de Remo
|
 |
| Cinta de Correr |
|
 |
| Máquina de Pesas |
¡ÁNIMO Y CUÍDENSE MUCHO!
CUADERNO DE BITÁCORA
Septiembre de 2020
1ª semana
Primera reunión en la que hemos hablado de cómo organizarnos, de las normas a seguir para que todo vaya sin problemas, de las actividades pendientes con el E=WALL (visitas, noticias y entrevistas que pueden seguir en nuestro blog de la temporada CITY SHAPER).
2ª semana
Empezamos ya preparando la jornada de puertas abiertas en nuestro local, que previsiblemente se celebrará el sábado 10 de octubre, para mostrar todos nuestros proyectos y transmitir sobre todo a los más jóvenes nuestra pasión por la Ciencia y la Tecnología.
Así aprovecharemos a hacer encuestas para ver qué problemas tenemos en nuestro entorno relacionados con el tema de esta temporada. Y también hacemos tiempo hasta que nos llegue el set del Juego del Robot que, como en años anteriores, nos llegará varias semanas después que a los equipos peninsulares. Es lo que tiene vivir en "El Paraíso". ;)
Cuanto antes nos llegue, antes podremos elaborar nuestro videotutorial de las Reglas del Juego del Robot, y que tanto ayuda sobre todo a los nuevos equipos.
3ª semana
Seguimos organizando la jornada de puertas abiertas, elaborando el cartel para distribuirlo en redes sociales y la encuesta sobre nuestro proyecto. Además tendremos que adquirir carpas, sillas y mesas.
Hemos encargado una mesa FLL nueva (creemos que nos lo merecemos, jaja) porque la que usamos tiene ya 7 años. ¡Le hemos dado muuuuucha caña y ha sufrido 3 mudanzas!
4ª semana
Terminamos la semana con nuevas restricciones debidas al número de infectados por COVID-19 en nuestra isla. Por ello nos vemos obligados a posponer el día de puertas abiertas hasta nuevo aviso.
Por fin ha llegado el set del Terreno de juego del robot, aunque nos han cobrado tasas de aduanas (25€), que no deberían haberlo hecho, según la organización nacional.
Octubre de 2020
5ª semana
Continuamos con la preparación de material para la jornada de puertas abiertas. Hemos consultado al Ayto si lo podemos organizar, al ser al aire libre, a pesar de las restricciones que se extienden hasta el día 17 de momento.
Hemos empezado a armar los modelos de misión, con ayuda de los ex-FLL, que han tenido su primera reunión FTC, para planificar la temporada y según cómo vaya todo inscribirse en el torneo nacional de esta temporada ULTIMATE GOAL. De momento hay que pedir material para ir trabajando.
Tuvimos nuestra propia "romería" trasladando la antigua mesa FLL a la zona de talleres de nuestra sede. ¡Trabajo en equipo!
6ª semana
Ya tenemos lista la encuesta como parte de la investigación de nuestro proyecto de innovación. Pueden acceder a ella en el siguiente enlace. Difundan, por favor ¡Gracias!
Encuesta actividad física RePLAY
También hemos terminado de montar el Desafío del Juego del Robot, ¡en nuestra mesa nueva! Pronto tendremos listo el videotutorial sobre las reglas de este nuevo desafío.
7ª semana
Disfrutamos de un videochat con nuestros amigos navarros del equipo This Capacited Team, en el que intercambiamos experiencias sobre cómo va la temporada y cómo la estamos afrontando con esta pandemia. Lamentablemente ellos no se pueden reunir como nosotros, al estar en una zona de mayor riesgo de contagio. ¡Mucho ánimo chic@s!
El próximo sábado 24 por fin podremos celebrar el día de puertas abiertas en la terraza de nuestro local, ya que ese día, si todo va bien, será el primero sin restricciones en cuanto a reuniones en Tenerife. En horario de 12 a 14 h. y de 16 a 18 h., explicaremos nuestros proyectos y trayectoria del equipo, además de actividades y demostraciones del Juego del Robot, todo siguiendo el protocolo de seguridad. ¡Están todos invitados!
Recordamos nuestra ubicación:
SEDE ALDEATRÓN ROBOTIX
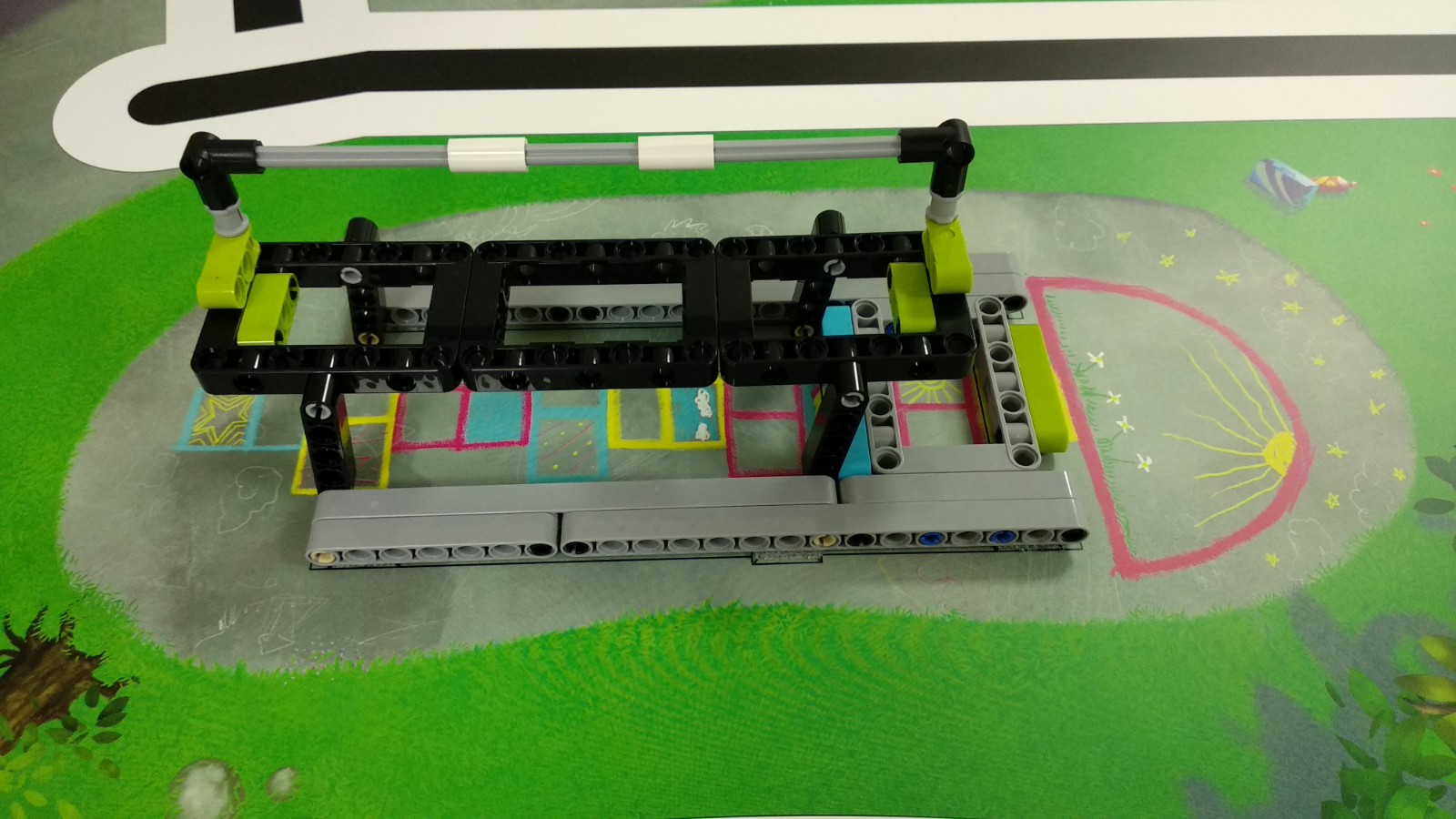
En cuanto a nuestros proyectos RePLAY, la encuesta va bastante bien, con 80 respuestas, y el robot va cogiendo forma, este año intentando un diseño lo más simple posible, pero con la misma capacidad que años anteriores, con 2 sensores de luz/color y un girosensor para la navegación, y un sensor de luz/color para detectar accesorios, usando nuestro clásico programa de menú por colores "HAPPY".
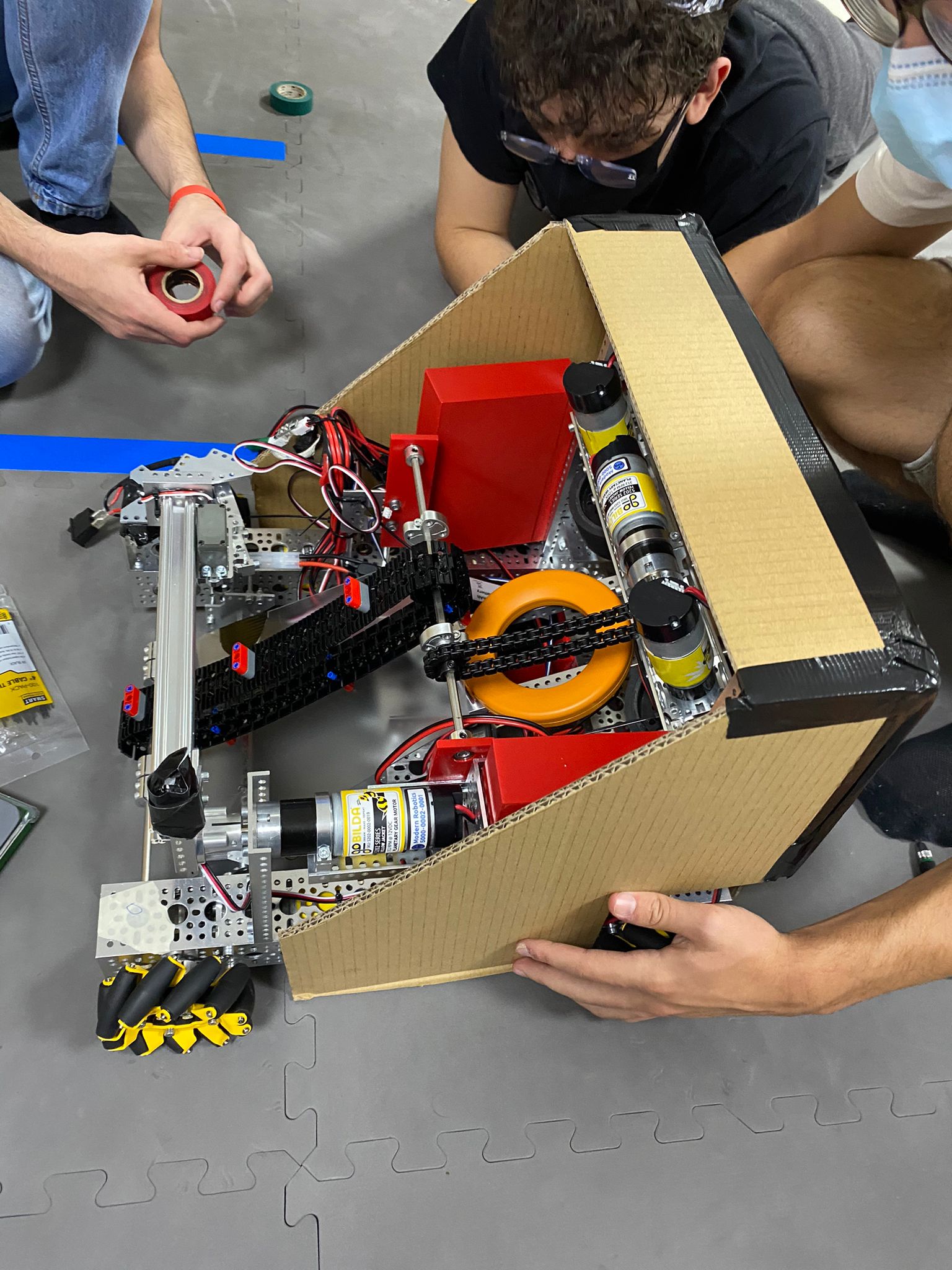
Nuestros compañeros de FTC siguen trabajando en el diseño del robot mientras llega todo el material, adquirido en goBILDA (hardware) y REV Robotics (control y electrónica), y que ya está en camino desde USA. Esperamos no tener problemas con aduanas.
8ª semana
Por fin pudimos celebrar nuestra primera jornada de puertas abiertas, a pesar de las restricciones, que en Tenerife aún no permiten reuniones de más de 10 personas. Fue una experiencia genial, en la que compartimos los proyectos de los últimos años, como Whale Angel (Animal Allies), Smart Pipe (Hydro Dynamics), Glove Me 5 (Into Orbit) y, por supuesto, E=Wall. Además contamos la historia del equipo desde que se formó en el CEIP Aldea Blanca en 2012 y ¡muchas anécdotas! También hubo exhibiciones del Juego del Robot City Shaper y otras actividades para toda la familia. Todo siguiendo las precauciones necesarias para minimizar contagios por COVID-19. ¡Muchas gracias a todos los visitantes!, sobre todo a nuestros amigos de La Jaca Robótica, de Arico, con los que organizaremos la microFLL en su municipio.
El robot va por buen camino, viendo la colocación más adecuada de motores de accesorios y sensores. Además habrá que hacer pruebas de fuerza para ver qué tal van los motores medianos que vamos a usar esta vez. En cuanto al proyecto, ya tenemos más de 80 respuestas a nuestra encuesta sobre actividad física. ¡Gracias a todos!
El equipo FTC ha recibido ya todo el material del robot, que ha tardado menos de una semana en llegar ¡Tuvimos suerte con las aduanas! El próximo sábado harán una visita a la área de Robótica del ITER para conocer con más detalle su trabajo y coger ideas.
 |
Practicando ya con las anillas ULTIMATE GOAL 😁
|
9ª semana
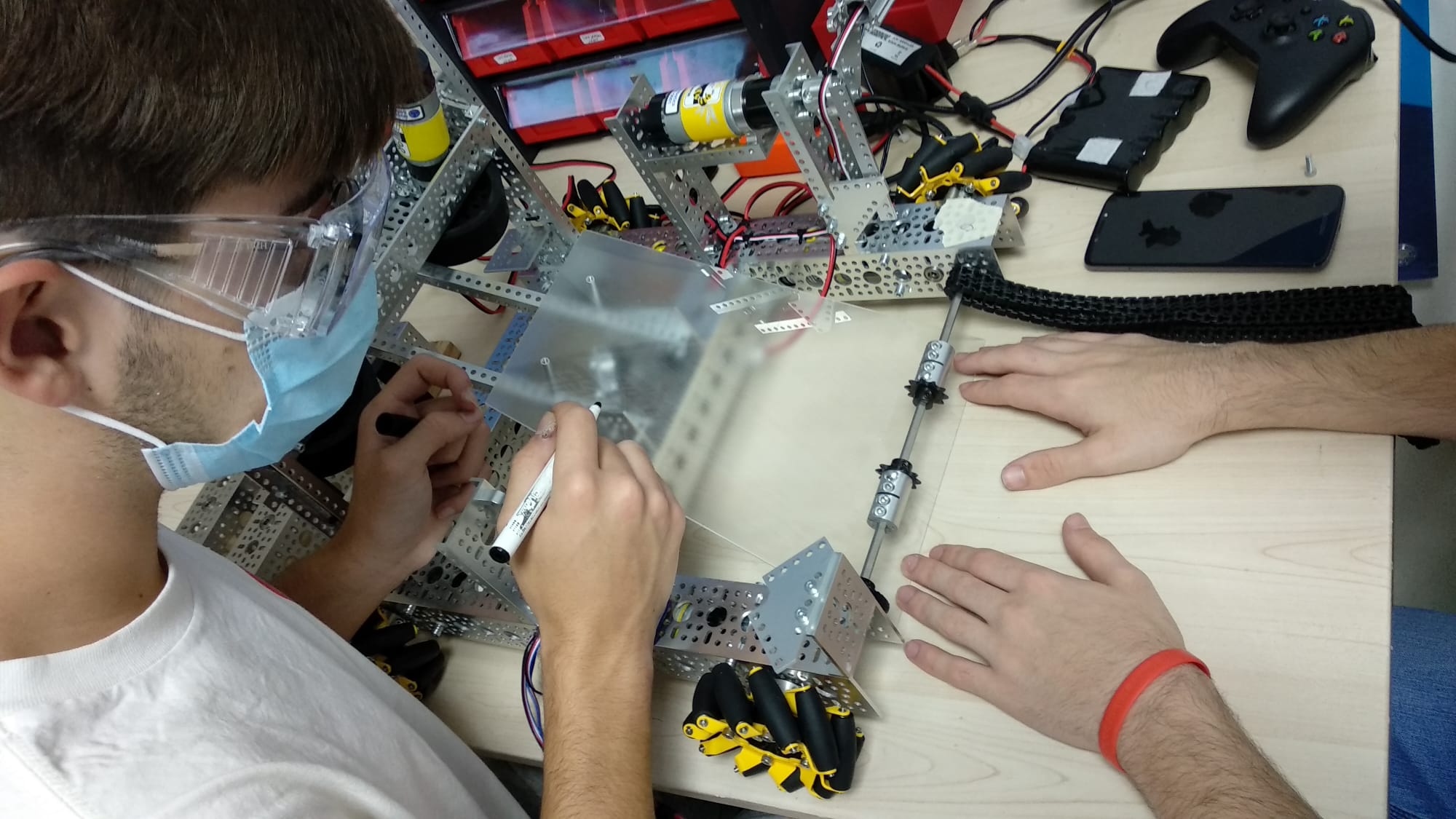
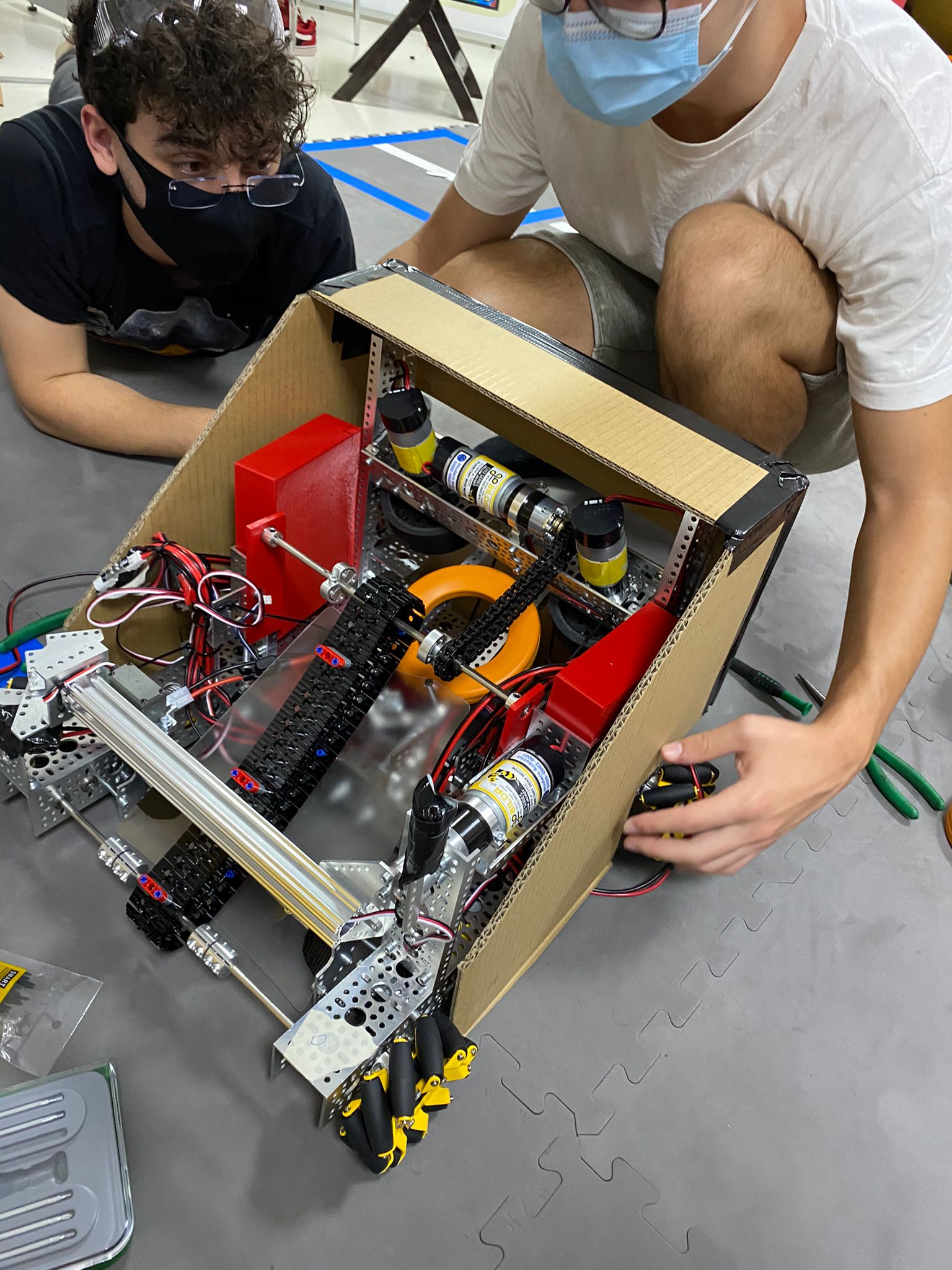
Seguimos diseñando el robot de forma que sea más compacto, pequeño y ligero que en años anteriores. Por eso estamos usando 2 motores medianos para mover los accesorios, que se pueden integrar mejor en la estructura junto a los sensores.
Nuestra entrevista en el programa "El Mentidero" del Ayto. de San Miguel de Abona ya salió a la luz en la redes y la pueden ver en el siguiente enlace:
El equipo FTC visitó las instalaciones del grupo de Robótica del ITER, donde vieron cómo va el robot de visitas Marysol, bastante bien por cierto, y otros proyectos como HELIODRON, el avión solar de vigilancia.
Empezaron ya a configurar el sistema de programación y control del robot con el material de REV Robotics. También hay que solucionar un problema de adaptación de las ruedas mecanum de REV a los motores de goBILDA.
Noviembre de 2020
10ª semana
Nuestro videotutorial está en proceso. Esta temporada está tardando un poco más ya que Sofi aún no ha podido volver. Queda la opción de que nos envíe su parte grabada.
El robot está casi listo a falta de colocar la carcasa exterior y los 2 sensores de color delanteros.
En cuanto al proyecto, se ha sugerido una nueva idea muy interesante, que tendremos que investigar, ver soluciones existentes, viabilidad de nuestra propuesta, etc, etc.
También hemos estado analizando los resultados de la encuesta que vamos obteniendo.
El equipo FTC ha configurado el sistema de control; sólo queda traer un mando de PlayStation para hacer la prueba de motores. Ya está resuelto el problema de adaptar las mecanum de REV a los hub de goBILDA, simplemente agrandando los agujeros de las ruedas, teniendo cuidado de que el eje quede centrado.
Ya están montando el chasis o base motriz del robot, usando 4 motores para poder utilizar las 4 ruedas mecanum.
11ª semana
Ya queda menos para estrenar nuestro videotutorial del Juego del Robot.
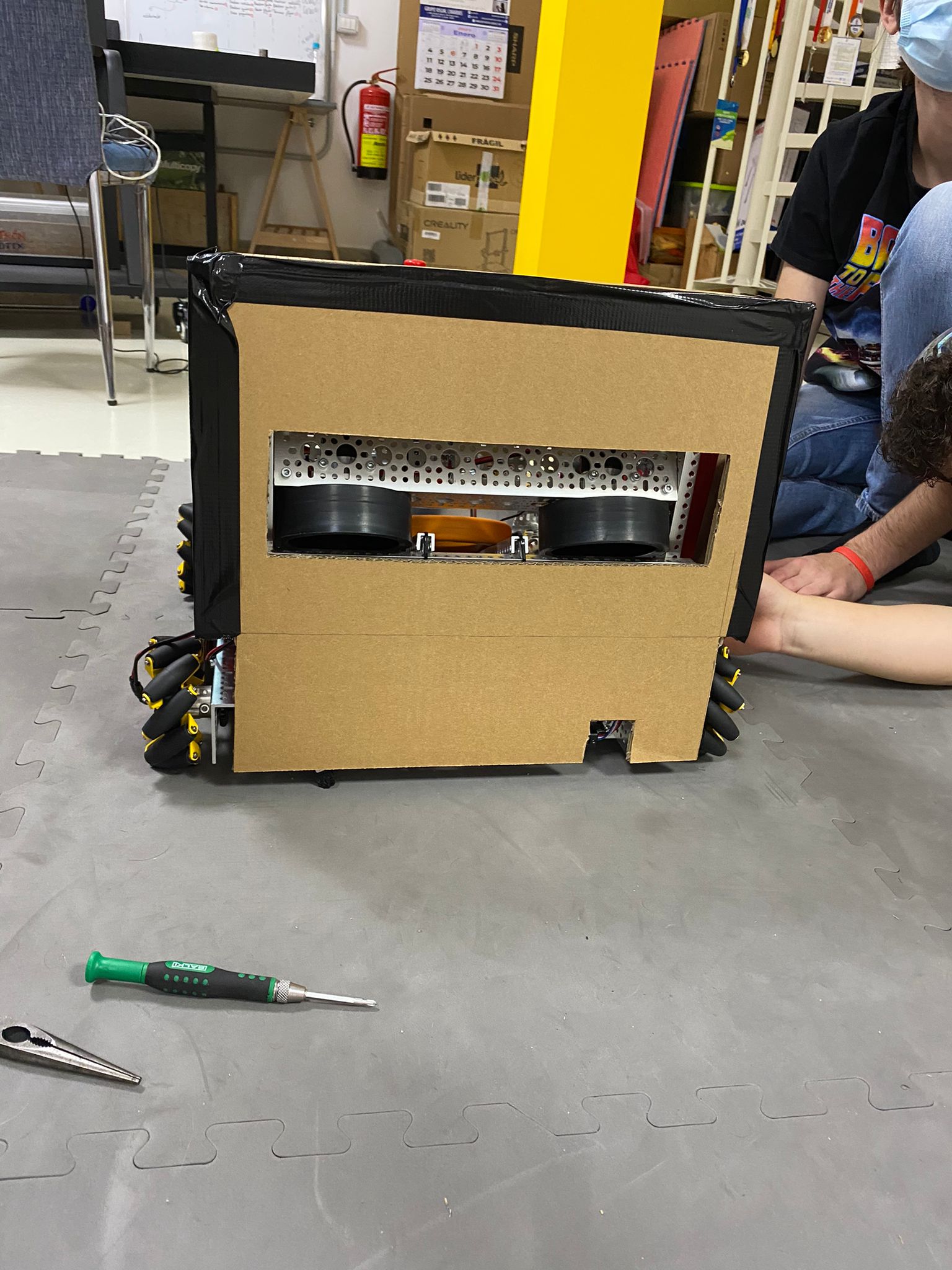
El robot sigue progresando, teniendo ya parte de la carcasa y todos los sensores ya colocados y cableados. Es importante que el brick se pueda extraer fácilmente, pero al mismo tiempo quede bien sujeto, con acceso al puerto de carga de la batería. Al mismo tiempo lo vamos diseñando en LDD.
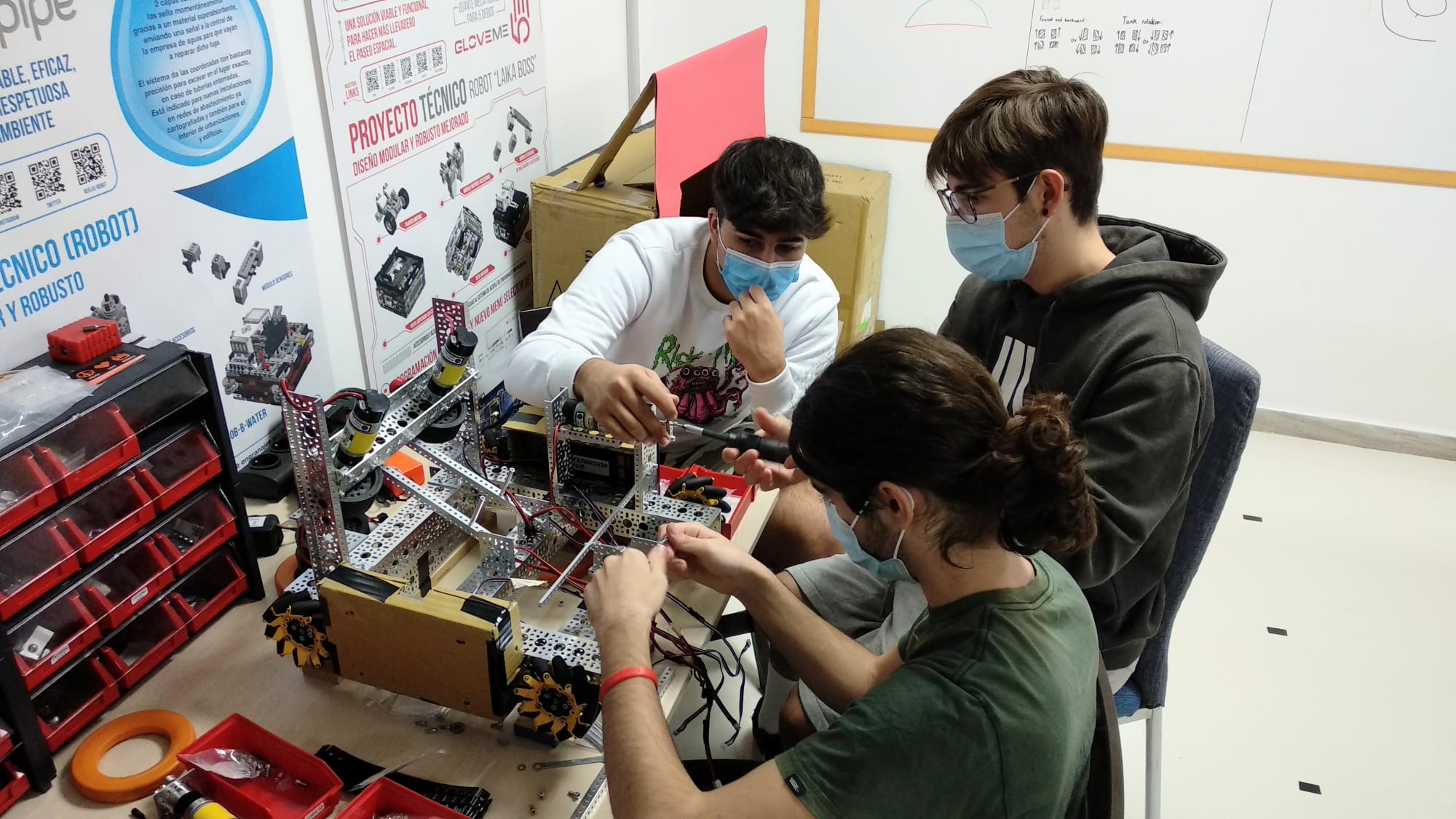
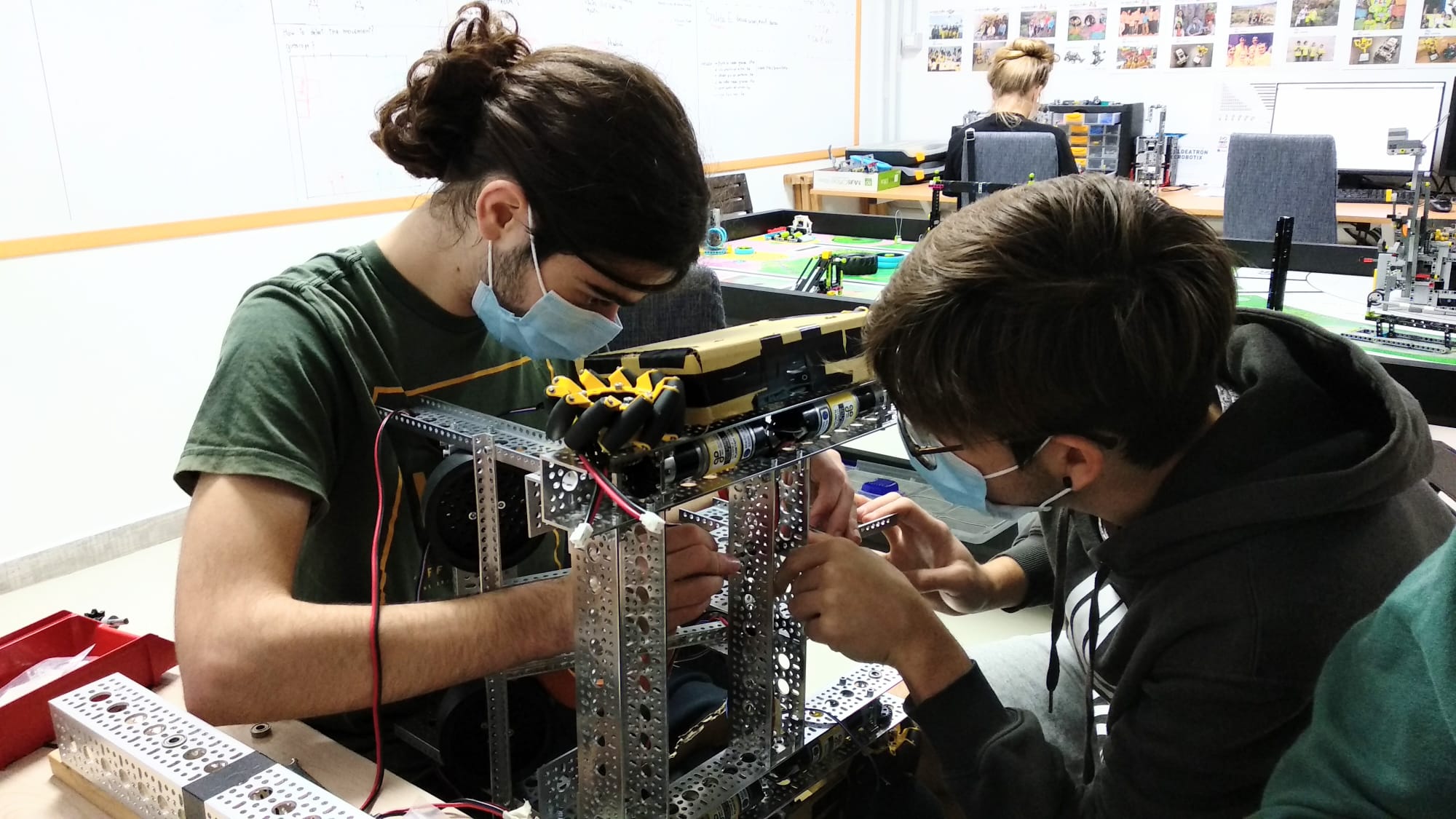
El equipo FTC ha avanzado muchísimo en la construcción y programación de su robot, solventando algunas dificultades a la hora de montar ruedas y motores en el chasis, ya que no se pudieron pedir algunas piezas indicadas en las instrucciones por falta de stock, por lo que hubo que sustituirlas por otras hasta conseguir el mismo resultado.
 |
Montaje de motores y ruedas
|
 |
Cableado de motores
|
 |
Conexión de motores al controlador
|
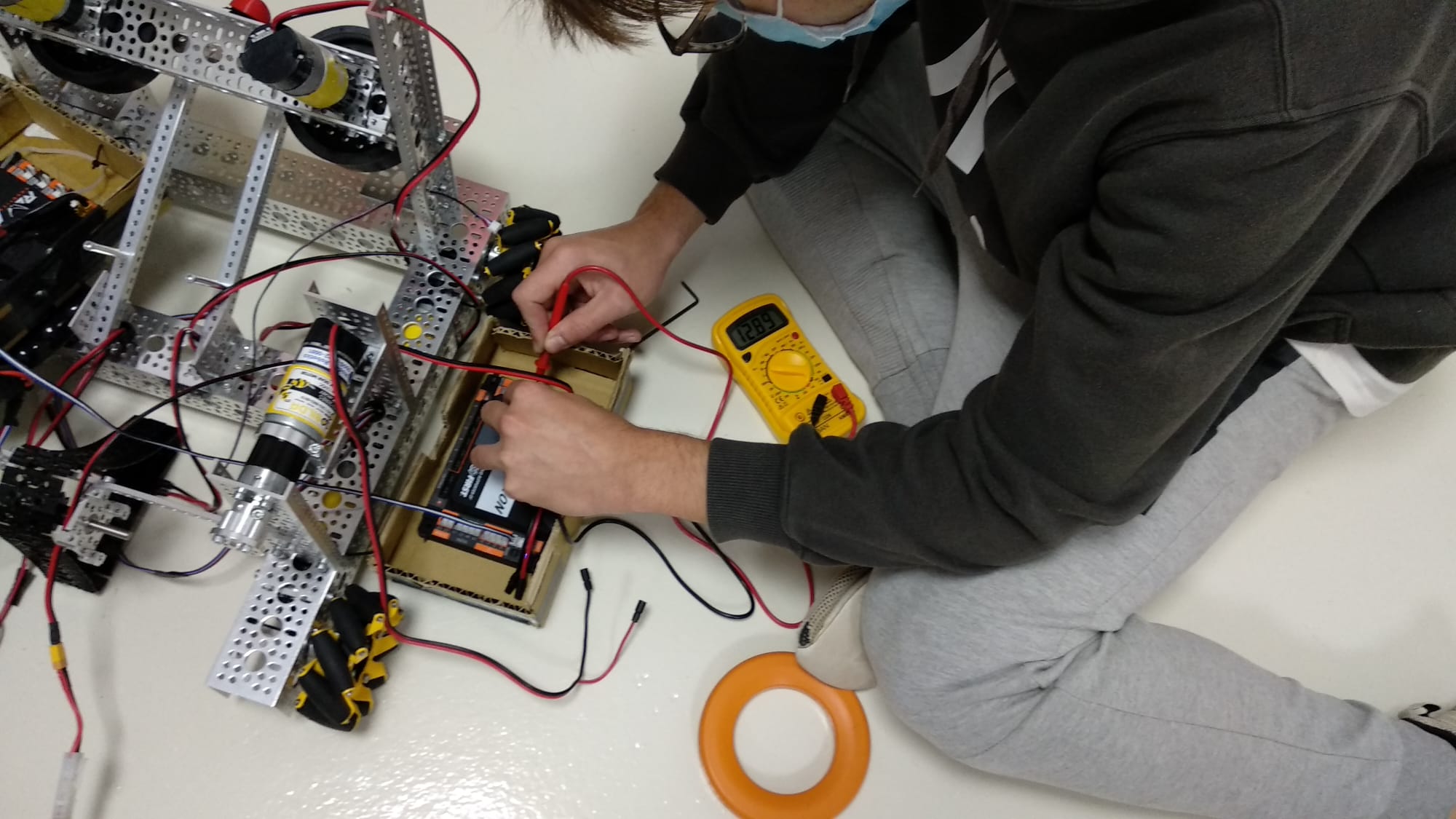
Paralelamente iban programando el software para controlar con un mando de Xbox una de las ruedas. Lo intentaron con mandos de otras marcas pero de momento solo funcionó con ese y en modo inalámbrico, ya que no había buena conexión con el cable OTG al móvil de Motorola, que actúa de enlace con el Control Hub instalado en el robot.
 |
Prueba de movimiento de un motor
|
Finalmente consiguieron hacer rodar el robot en cualquier dirección controlando las 4 ruedas. ¡Impresionante! Ahora queda seguir afinando el sistema de control de la base motriz. Para ello le han dado el nombre a los motores según las primeras letras del abecedario: A-ntonio, B-artolomeo, C-oncepción y D-olores. ;)
12ª semana
¡El videotutorial ya está listo! ¡Por fin! Pueden verlo en el siguiente enlace:
Nuestro robot está casi a punto. Sólo queda cerrar la carcasa y hacer pruebas de motores y sensores, sobre todo el de accesorios, para comprobar que detecta correctamente el color de cada uno.
Tenemos que anunciar con mucha pena que nuestra querida compañera Laura, la más veterana (este era su sexto año en FLL), ha tenido que dejar el equipo por incompatibilidad con sus estudios, aunque seguirá vinculada al equipo, ayudándonos en lo que pueda. ¡La echaremos mucho de menos! Así quedamos 3 en el equipo, pero trabajaremos duro para sacar los proyectos adelante con mucha ilusión, como siempre.
El equipo FTC sigue superando retos y dificultades con su robot. Van afinando el software de control y mejorando el hardware, ajustando piezas para que sufran lo menos posible.
También están fabricando una de las torres de puntuación (Tower Goal) con las cajas donde recibieron el suelo oficial del terreno de juego.
13ª semana
Ya tenemos listo el robot para empezar a diseñar los accesorios, después de ver la estrategia que vamos a seguir para superar las misiones que podamos.
Nuestros compañeros de FTC, han mejorado el sistema de control para que los movimientos del robot respondan bien a los mandos, en este caso de Xbox, que parece que son los que mejor funcionan, según las pruebas que han hecho.
 |
Trabajo en equipo para sujetar de la mejor manera cableado y componentes electrónicos
|
Cada partida dura 2,5 minutos (como en FLL) y se divide en una parte autónoma (los primeros 30 s) y otra teledirigida. En ésta se necesita un mando para el desplazamiento del robot y otro para el movimiento de accesorios (por ej. el recogedor y lanzador de anillas).
 |
Chasis con sistema electrónico de control
|
También terminaron de fabricar la Tower Goal para practicar lanzamiento de anillas, el robot y todos nosotros, jaja.
Diciembre de 2020
14ª semana
Esta semana es la del gran puente (de viernes 4 a martes 8) por lo que aprovechamos para quedar el viernes por la tarde ambos equipos juntos y el lunes por la mañana FTC (3 miembros máximo) y por la tarde FLL. Todo esto debido a las nuevas restricciones por COVID, bajando a 4 las personas que pueden reunirse.
La gran noticia es que Sofi ya está por fin con nosotros, así que nos pusimos manos a la obra con la estrategia del robot y cómo diseñar los accesorios de las misiones más asequibles de momento, sobre todo la del Banco y el Contador de Pasos, las más cercanas a la Zona de Lanzamiento, aunque también lo están el Tobogán y el Larguero.
También dimos un repaso al proyecto, analizando los problemas que más impiden a la población hacer ejercicio, partiendo de la encuesta y de estadísticas en diversas fuentes.
También aprovechamos para hacer una sesión de fotos, ahora que ya estamos los tres juntos.
 |
Concentrados en nuestras mascotas 😍
|
Nuestro entrenador Tony participó en un webinar contando nuestra experiencia la temporada pasada y cómo nos adaptamos a las nuevas circunstancias con esta pandemia.
Los compis de FTC han estado ajustando de nuevo las ruedas y los engranajes cónicos para mejorar el desplazamiento del robot con el software y avanzando en el diseño del sistema recogedor-disparador de anillas mediante el programa Blender.
Al mismo tiempo han probado un disparador con 2 motores, aunque hay que aumentar la velocidad para lanzar las anillas la distancia suficiente.
15ª semana
Esta semana seguimos con las reuniones de solo 4 personas, por lo que no podemos estar ambos equipos juntos. Así que FLL nos reunimos el viernes en la academia para adelantar la parte de robot, y el sábado en casa de Sofi, para avanzar con el proyecto. En esto último vamos centrándonos ya en el problema elegido. También hicimos otra encuesta como fuente adicional de información.
El equipo FTC está intentando usar los motores de 312 rpm para lanzar las anillas, pero combinándolos con un tren de engranajes para conseguir al menos 1800 rpm. Además han imprimido en 3D unas piezas para unir y deslizar 2 perfiles entre sí, que serán parte del brazo recogedor de las peonzas.
16ª semana
Esta semana continuamos investigando sobre nuestra problemática elegida para el proyecto de innovación, viendo también las soluciones existentes. También estamos preparando entrevistas a varios profesionales en la materia. En cuanto al robot, estamos viendo qué misiones hacer en cada salida, que en principio serán tres.
El equipo FTC ha conseguido por fin lanzar las anillas una distancia suficiente para que alcancen la portería, combinando engranajes y cadenas, teniendo en cuenta que las ruedas disparadoras han girado a unas 900 rpm.
ACTUALIZACIÓN E=WALL
Hemos solicitado ya la patente de nuestra invención, en realidad el Modelo de Utilidad para que el proceso sea más rápido, y estamos a la espera de que se publique en el BOPI (Boletín Oficial de la Propiedad Industrial) si no hay que subsanar algún error en la solicitud.
Además estamos pendientes de empezar a hacer pruebas en una fábrica de bloques de nuestro municipio, gracias al acopio de materiales (cartón y rabo de gato) por parte del Ayuntamiento.
¡FELICES FIESTAS Y MUCHA SALUD EN EL 2021!

17ª semana
Esta semana nos reunimos lunes y martes para descansar y disfrutar de los días de fiesta. En el proyecto seguimos aportando ideas y analizando las soluciones existentes al problema elegido, viendo sus limitaciones y dónde podemos aportar una solución innovadora. En el robot estamos diseñando primero los accesorios mediante bocetos, empezando por los mecanismos más simples.
Ha sido todo un honor aparecer en el informe anual de FIRST (páginas 15 y 19):
El equipo FTC sigue probando su lanzador de anillas, pero aún no consiguen la distancia ni la puntería suficientes. También siguen imprimiendo mejores piezas para el brazo recogedor de peonzas.
¡FELIZ AÑO 2021!
Enero de 2021
18ª semana
Estamos realizando bocetos de los accesorios para luego pasarlos a LDD, una vez hayan funcionado los prototipos. De momento estamos con la primera salida, que hará el Contador de Pasos, la Cinta de Correr y la Máquina de Remo, además de recoger una Porción de Salud.
El equipo FTC ha recibido el material que les faltaba para completar correctamente la base de desplazamiento del robot (ruedas mecanum Gobilda, engranajes cónicos y 2 motores de 6000 rpm para el disparador de anillas, entre otras piezas). Tienen un pequeño problema y es que los engranajes cónicos que conectan los motores con las ruedas quedan muy apretados entre sí, por lo que habrá que revisar el montaje y las instrucciones.
También han empezado a preparar el cuaderno de ingeniería, guiándose por los de equipos más veteranos estadounidenses, en cuanto a los apartados que debe incluir. El cuaderno debe ser en inglés, al igual que la presentación ante los jueces durante el torneo, e incluir cualquier mejora en el robot, tanto de hardware como de software, para reflejar todo el proceso seguido de ensayo-error.
19ª semana
En el proyecto de innovación seguimos comparando nuestra solución con las ya existentes, incluyendo patentes y viendo qué materiales serían los más adecuados. En cuanto al robot, hemos repasado el controlador PID para aplicarlo como siguelínea a este desafío; lo explican muy bien los hermanos Seshan en su web EV3Lessons:
Los compañeros de FTC han conseguido montar ya el chasis correctamente, gracias a una actualización en las instrucciones de montaje, ya que la forma de los nuevos engranajes de motor hace que queden más apretados de lo normal con los engranajes de rueda. También hicieron las primeras pruebas del lanzador de anillas con los motores de 6000 rpm, a diferentes rpm y ver las óptimas para meter las anillas en la portería de forma eficaz.
20ª semana
Un fin de semana bien aprovechado, en el que hemos estado probando algunos materiales para nuestra solución, aunque queda mucho por investigar.
Y también hemos ido probando los accesorios que vamos diseñando por si hay que modificar algún componente, como así nos ha ocurrido con el accesorio del Contador de pasos y la Cinta de correr.
Los chicos de FTC han empezado a elaborar un primer prototipo de recogedor de anillas y han hecho más pruebas del lanzador.
También están viendo cómo usar el giroscopio en la programación en modo autónomo, combinándolo con otros sensores para conseguir una odometría lo más precisa posible. Hay que tener en cuenta que las ruedas pueden patinar sobre el terreno de juego, por lo que deben recurrir a todas las ayudas posibles.
21ª semana
Hemos videochateado con el equipo The Outsiders, de Massachusetts (EE.UU), respondiendo a sus preguntas sobre nuestra experiencia en el Global Innovation Award. ¡Encantados de ayudarles y mucha suerte chicos! 🍀
Nos hemos dado cuenta de que nuestra solución ya está desarrollada e incluso comercializada, así que optaremos por otra solución que ya habíamos barajado. Menos mal que aún estamos a tiempo por el aplazamiento de los torneos 😅.
En cuanto al robot, tenemos ya las misiones de la Cinta de correr y la Máquina de remo, aunque necesitan mejoras ya que hace demasiados giros, lo que introduce más errores en la navegación. Por ello intentaremos seguir líneas lo máximo posible para aproximar el robot con el mínimo error a cada modelo de misión.
Nuestro entrenador Tony volvió a participar en un webinar organizado por FLL España, explicando nuestro modo de trabajar los Valores, Proyecto y Robot, dando consejos sobre todo a los equipos con menos experiencia.
Los compis de FTC han estado construyendo un prototipo de lanzador de anillas y programando el sensor de distancia para el modo autónomo del desafío (los 30 primeros segundos de los 150 que dura la partida). Más adelante harán lo mismo con los sensores de color y giroscopio para conseguir una buena odometría.
22ª semana
Este viernes hemos hablado con el equipo Cia-María de Logroño, con el que hemos compartido lo que estamos haciendo en el proyecto de innovación y robot. Nos encantó su proyecto de un cargador de móviles mediante pedaleo, del que ya tienen hasta un prototipo que funciona. ¡Enhorabuena chicos! Encantados de charlar con vosotros. ¡Mucho ánimo y suerte!
En el proyecto de innovación continuamos probando materiales y dejando la terraza perdida, jaja, pero al terminar dejamos todo bien recogido y ordenado. 👍
Con el robot hemos avanzado bastante, procurando llegar a la Cinta de correr y Máquina de Remo siguiendo la línea, después de ejecutar el Contador de pasos de una manera muy original. Intentaremos en esta ruta dejar las 3 Porciones de salud colgadas en el Larguero.
Y por fin tenemos ya fecha para la FLL Canarias: ¡8 de mayo! Pero no nos podemos relajar.
El equipo FTC va progresando adecuadamente con el diseño y construcción del disparador de anillas, además del recogedor de anillas, para el que van a probar con piezas LEGO, y así no tener que imprimir tantas en 3D.
 |
Sujetando los motores disparadores a la base de desplazamiento
|
La programación del modo autónomo sigue avanzando, viendo cómo programar el giroscopio para mostrar aceleración y posición en los 3 ejes, además de probar el sensor de distancia láser con una pared blanca, una superficie negra y una superficie semitransparente.
Febrero de 2021
23ª semana
Esta semana hemos contactado con un colectivo de nuestro propio barrio que se puede beneficiar de nuestro proyecto de innovación, que también puede solucionar un problema de otros colectivos. Debemos seguir haciendo pruebas con nuestro material para compararlo con el que están usando estos colectivos actualmente, y ver todas las ventajas e innovación que podemos aportar.
El robot tiene casi lista la primera ruta, en la que realiza las misiones del Contador de pasos, deja colgadas las 3 Porciones de salud de Casa en el Larguero, la Cinta de correr, la Máquina de remo, saca las 2 figuras del Tobogán, baja el Banco, se lleva el Respaldo y arrastra a Casa la Rueda azul y 1 Porción de salud. La figura inferior del Tobogán está costando un poco más pero seguiremos en nuestro empeño.
El equipo FTC ya tiene montado el disparador de anillas, que han probado con buenos resultados, aunque quizás deberían aumentar el ángulo para meter las anillas en el cajón superior.
 |
Configurando cableado
|
En cuanto al software, integraron la programación del giroscopio en el programa principal del modo autónomo e intentaron programar un servo que les servirá para empujar las anillas hacia los motores disparadores.
24ª semana
Esta semana hemos investigado sobre materiales que podríamos usar en nuestra solución.
En el robot seguimos programando la primera ruta para cronometrarla; suponemos que va a ser la que más tiempo tarde al dar la vuelta a todo el tapete haciendo misiones. También hemos hecho un accesorio que que deja de forma autónoma 4 cubos en el banco y hemos intentado hacer un accesorio para que el robot termine colgado en el Larguero, sin demasiado éxito...¡de momento!
Los chicos de FTC han corregido el ángulo de disparo para introducir las anillas en el cajón superior (máx puntuación), han hecho dos cajetines para colocar un hub a cada lado y siguen con la construcción de la oruga recoge anillas.
 |
¡El monstruo de las rosquillas!
|
 |
| Pablo (FTC) enseñando el robot a Sofi (FLL) |
|
|
|
También han conseguido programar el servo, aunque habrá que hacerle alguna modificación para que se mueva más rápidamente.
25ª semana
Hemos visitado al equipo de Gimnasia Acrobática Acroflyers, al que estamos intentando ayudar con nuestro proyecto ¡Muchas gracias chicas! En especial a su entrenadora Candelaria. Han llegado a conseguir varios títulos nacionales, a pesar de las condiciones en las que entrenan. ¡Además son de nuestro propio municipio y el único equipo canario!
Nuestro entrenador Tony volvió a participar en un webinar de FLL Spain, esta vez para hablar sobre el proyecto de innovación en particular y dar algunos consejos.
El robot va a buen ritmo, con nuevos añadidos al accesorio de la primera ruta, uno para hacer la Máquina de Pesas y otro para llevar el Teléfono a Casa. También estamos intentando ajustar mejor el programa siguelínea PID para que el seguimiento sea más suave aún. Para la segunda ruta estamos rehaciendo el accesorio para la misión de Baloncesto.
El equipo FTC sigue desarrollando el recogedor de anillas mediante una oruga que las atrapa y las sube hasta el cargador (con capacidad para 3). De ahí un servo o una especie de pistón las empujará hacia los discos disparadores.
Otra parte que también tienen bastante avanzada es el brazo recoge peonzas (o péndulos). Y lo más importante del desafío es el Cuaderno de Ingeniería, en el que tienen que reflejar su viaje de aprendizaje.
26ª semana
Esta semana tocó visitar a los chicos de La Jaca Robótica, del municipio de Arico (a 20 min de nuestra sede), con los que pasamos un rato muy divertido compartiendo proyectos ¡Son geniales! Ellos, como nosotros, no pertenecen a un centro educativo. Probablemente ambos equipos seamos los únicos de Tenerife Sur en participar en la FLL Canarias 2021.
En cuanto al proyecto, continuamos con nuestras pruebas de diferentes materiales hasta dar con la solución idónea a nuestro problema.
En el robot tuvimos que sustituir el girosensor por otro, ya que se volvía loco cada 2x3. De momento este último va mucho mejor. Necesitamos mejorar el siguelínea; curiosamente va bien al ejecutarlo aisladamente pero no va tan bien con el programa completo. Hemos conseguido un mecanismo muy sencillo para atrapar la rueda azul sin que se salga de nuevo. También hemos cambiando algunos tramos largos por un mibloque de aceleración-desaceleración, lo que nos ahorra algunos segundos.
El equipo FTC, AldeaTec, ha estado liado buscando un fallo con su brazo recoge peonzas. Estuvieron probando a cambiar el motor, cableado, midiendo tensiones en los puertos de Control y Expansion Hubs, pero no daban con la causa de que el brazo sólo girara en un sentido.
Hasta que al final encontraron la solución en el software 😅 Menos mal que no era un problema de los controladores.
Sólo les queda poner un tope donde pega el brazo al recogerlo y un servo en la pinza que agarra la peonza.
Marzo de 2021
27ª semana
Asistimos a un webinar muy interesante en el que participaron deportistas de élite muy conocidos, incluido un paralímpico.
Estamos elaborando ya la memoria de nuestro proyecto, rellenando los apartados según los resultados que vamos obteniendo.
En el robot hemos tenido que crear un programa para calibrar los 2 sensores de color de navegación por separado para ganar precisión en el seguimiento de líneas. Seguimos construyendo los accesorios para la segunda ruta: el vehículo que deja los cubos en los huecos del Banco y lleva el Modelo de Innovación, el que hace el Baloncesto la misión compartida de Boccia y lleva las figuras del Tobogán a Casa.
El equipo AldeaTec tiene ya montados la Portería y Power Shots oficiales. Si quieren meter las anillas en el cajón superior (High Goal) y darle a los Power Shots tendrán que variar de nuevo el ángulo de disparo o modificar la potencia según el objetivo, ya que están a distinta altura. Finalmente ajustaron la potencia al 45% y consiguen ambos objetivos.
También han estado montando el servo que empuja las anillas hacia los disparadores y el que mueve la pinza del brazo que coge las peonzas. Para completar la pinza han imprimido un gancho en 3D.
28ª semana
Esta semana nos hemos centrado en el robot, por un lado en la programación, creando dos nuevos mibloques: uno para hacer que el siguelínea PID se pare cuando el otro sensor detecta una línea negra y otro para crear un bloque de espera personalizado con los valores obtenidos en la calibración de cada sensor por separado. Así obtenemos más precisión al acercarnos al Contador de pasos y enganchar la rueda de la Máquina de remo, además de otros recorridos como lo aproximación a la Máquina de pesas.
Y por otro con el diseño del accesorios: uno para dejar los cubos en el Banco y el modelo de proyecto junto a él; otro para subir la cesta de Baloncesto y accionar el modelo colaborativa de la Boccia; y otro para colgar el robot del Larguero. Este último lo conseguimos con ayuda de 2 actuadores.
 |
Nuestro Snitch-bot haciendo dominadas
|
Nuestros compis de AldeaTec ya están diseñando su logo y camiseta. ¡Seguro que quedará genial!
También han diseñado una rampa por donde recoger las anillas y unos cajetines donde colocar los hubs en el robot, aislados de las partes metálicas para evitar que se dañen con la electricidad estática.
Y el cableado está organizado con ayuda de bridas para evitar daños y confusión.
El viernes nos visitó Julio, el entrenador del equipo Cintegra Tech, de Aldeas Infantiles, al que prestamos 10 anillas para que puedan entrenar con material oficial. Lo más probable es que podamos celebrar juntos el torneo, que será el sábado 29 de mayo; por la mañana las presentaciones y 3 partidas, y por la tarde la ceremonia de clausura.
29ª semana
Nos hemos dedicado a mejorar la segunda ruta del juego del robot, con algunos ajustes en el accesorio que deja los cubos en el Banco y la oruga que sube la cesta de Baloncesto. También estamos intentando solucionar un problema al levantar las Pesas.
El equipo AldeaTec ha tenido un videochat con sus compis del equipo Cintegra Tech, para intercambiar experiencias de cómo han diseñado y programado el robot hasta ahora. Se desearon mucho ánimo y seguirán en contacto.
Y también les visitó su mentor Jorge para ver su progreso y darles algunos consejos, sobre todo con la navegación autónoma.
Han seguido mejorando el brazo de las peonzas y viendo la mejor forma de de construir el recogedor de anillas.
 |
Teamwork makes dreams work
|
30ª semana
Lo mejor de esta semana ha sido videochatear con los chicos de los equipos mexicanos Baldorobotic y Rottweiler Robotic, con los que hablamos sobre todo de cómo trabajar en equipo, además de la organización del trabajo y nuestra experiencia en FLL. ¡Ánimo y cuídense mucho!
El miércoles la organización nacional envió un email a todos los equipos inscritos para presentar si lo deseamos la memoria del proyecto de innovación, para optar a la candidatura nacional al Global Innovation Award, que este año vuelven a ser cuatro los representantes de España. Además debemos enviar un video de 2 minutos presentando nuestra innovación, como hicimos ya el año pasado. Así que ¡allá vamos de nuevo! Y para ello habrá que trabajar duro durante la Semana Santa, ya que la fecha límite es el martes 6 de abril. Nos dedicaremos sólo al proyecto y dejaremos de momento el robot.
ACTUALIZACIÓN E=WALL
La próxima semana haremos las primeras pruebas de fabricación de nuestro bloque, en la fábrica de nuestro municipio. Además nuestra solicitud de Modelo de Utilidad sigue adelante después de remitir las correcciones requeridas en la memoria.
El equipo AldeaTec también tuvo una reunión virtual con el equipo de Girona FEDAC Wolvineers, que ha participado ya en varias ediciones de FTC. Esperan verse muy pronto para intercambiar progresos con sus robots.
Ya tienen las cajas para los controladores impresas en 3D y faltaría hacer la de las baterías.
Han intentado hacer la rampa por donde subirán las anillas con el fondo de una bandeja de plástico, pero al cortarla se quebró, aunque se puede seguir usando como prototipo. Seguirán probando con otros materiales.
Abril de 2021
31ª semana
Una Semana Santa trabajando a tope todos los días para entregar a tiempo la memoria de nuestro proyecto y participar un año más en el Global Innovation Award. Este año, debido al aplazamiento de los torneos clasificatorios no habrá nominaciones al GIA en cada uno de ellos, sino que cualquier equipo inscrito en el desafío RePLAY podrá presentar su proyecto para optar a ser elegido entre los 4 representantes españoles. Éstos tendrán que enviar un formulario oficial de la organización del GIA con toda la información sobre su innovación en inglés antes del 21 de abril. ¡Mucha suerte y ánimo a todos los compañeros participantes!
Para ello hemos usado artilugios como este:
Sobre superficies como esta:
Tenemos como fecha límite el próximo martes 6 para entregar la memoria y un video de 2 minutos describiendo nuestra innovación. Así que dejamos de momento el robot hasta la próxima semana.
AldeaTec continúa desarrollando su recogedor de anillas. La superficie sobre la que subirán las anillas hacia el cargador debe ser más flexible, porque han probado con el fondo de una bandeja de plástico y es demasiado rígido para darle la curvatura adecuada en forma de S.
ACTUALIZACIÓN E=WALL
Gracias a la beca del GIA pagamos las tasas para seguir adelante con la patente (modelo de utilidad). Además hemos tenido que hacer correcciones a la memoria , según los requisitos de la Oficina Española de Patentes y Marcas. Esperamos que esta sea la definitiva y se publique en el Boletín Oficial de la Propiedad Industrial (BOPI) para que entre en la fase de oposición, por si alguien considera que ya existe algo así. Si no hay oposiciones, será ya publicada definitivamente, con una protección de 10 años.
En cuanto a la fabricación de nuestro bloque, gracias a la colaboración de nuestro Ayto. de San Miguel de Abona hemos podido hacer las primeras pruebas, que no han salido tan mal teniendo en cuenta que la máquina está diseñada para hacer bloques de picón.
 |
Preparando la pasta de cartón.
|
 |
5 bloques E=Wall recién salidos del "horno"
|
Así salían nuestros bloques del "horno":
E=Wall recién hecho
En la fase de prueba contamos con la colaboración del ITER, el Área de Arquitectura para edificar una pequeña construcción con E=Wall y otra con bloque de picón, y así comparar propiedades, y el Área de Robótica para monitorizar ambas construcciones y tomar valores de aislamiento acústico y térmico, durabilidad, resistencia a la humedad, etc. durante al menos un año para abarcar todas las estaciones.
32ª semana
Entregamos la memoria y video de nuestro proyecto para participar en el GIA justo a tiempo, sobre la bocina, jaja. Finalmente no fuimos seleccionados entre los 4 representantes españoles, pero ya lo tenemos casi listo para el regional. Empezamos a preparar la presentación y continuamos con el robot, en concreto, mejorando la misión de Baloncesto, dejando las Porciones de Salud en el logo RePLAY y los cubos en el campo de Boccia durante la tercera y última ruta.
Muchas felicidades a los cuatro equipos seleccionados:
- Las Acacias BOT de FLL Galicia. Solución para que las personas con limitaciones auditivas puedan practicar deporte.
- Roboluti_ON de FLL Alicante. Solución para la movilidad autónoma de personas con parálisis cerebral.
- GoalVolution de FLL Euskadi. Solución para facilitar la orientación en la práctica de deporte para personas con discapacidad visual.
- Vilabots de FLL Vic. Solución para fomentar la práctica del deporte mediante un sistema de realidad virtual.
Y mucha suerte en la fase internacional, en la que elegirán los mejores 200 proyectos del mundo. ¡Esto nos trae muy buenos recuerdos!
Nuestros amigos del equipo griego Robot Birds también fueron seleccionados para el GIA, así que hicimos una video charla para darles algunos consejos sobre la preparación de su proyecto.
 |
Good luck!
|
El equipo AldeaTec contnúa elaborando su cuaderno de ingeniería y al mismo tiempo solucionando algunos problemas con las ruedas mecanum; han estado revisando hard y soft para ver por qué no giran de forma más suave. Han tenido que desmontar de nuevo los motores y las ruedas para comprobar si había algún desgaste o rozamiento anormal y si estaban bien montadas todas las piezas.
Ambos equipos han compartido espacio, como todos los sábados por la mañana.
33ª semana
El martes 13 se desveló el tema del desafío de la próxima temporada: CARGO CONNECT. Hasta agosto no sabremos la normativa.
El equipo Robot Birds nos agradece en Facebook la ayuda con el GIA.
Traducción:
"Gracias al equipo de Aldeatrón Robotix por la maravillosa y creativa reunión!
Aldeatron Robotix es el equipo que ocupó el primer lugar en el Global Innovation Award el año pasado 🥇 ¡y compartió sus experiencias con nosotros! Hablamos de nuestros proyectos este año, ¡pero también del proceso de crisis! 🗒
¡Nuestros equipos se comunican y se conocen desde la temporada Into Orbit! ❤️
La magia y la diferencia de FIRST LEGO League Grecia es que crea una comunidad global basada en Core Values. ¡Todos estos años hemos hecho amigos en todo el mundo que comparten el mismo amor por la robótica, la ciencia y la innovación! ¡Relaciones basadas en el respeto y la noble profesionalidad!
¡Gracias Aldeatron Robotix! ¡Esperamos en algún momento decirlo de cerca en un evento! 🙏🏻"
Hemos compartido nuestra experiencia en el GIA con el equipo de chicas de Vigo Las Acacias BOT, Roboluti_ON de Alicante y Vilabots de Barcelona. Hemos intentado contactar con los vascos GoalVolutio pero no hemos recibido respuesta. Son los 4 semifinalistas españoles, junto a otros 146 equipos de todo el mundo, 86 de ellos estounidenses. ¡Mucha suerte a todos y a disfrutar de la experiencia!
Nosotros seguimos mejorando nuestro proyecto y ultimando los accesorios del robot para empezar los ensayos cuanto antes. ¡Ya sólo quedan 6 findes antes de la FLL Canarias!
En el accesorio de la primera ruta hemos tenido que cambiar una de las cadenas por un tren de engranajes para doblar la fuerza y poder levantar las Pesas en la posición amarilla (la que da más puntos). 💪
El equipo AldeaTec sigue con el diseño del recogedor de anillas, nada sencillo. Para ello probarán con algunas piezas impresas en 3D. También siguen elaborando el Cuaderno de Ingeniería, que va engordando por momentos. 😅
También tienen listo el cajetín para las baterías, con ventilación pasiva.
34ª semana
Parece que tenemos ya las fechas definitivas para la FLL Canarias: 27 y 28 de mayo las partidas presenciales y las presentaciones a los jueces online. El sábado 29 será la ceremonia de clausura. Lo mismo para FTC, con los que compartiremos edificio para dichas partidas.
El miércoles 21 enviaron los 4 equipos GIA sus memorias. ¡Esperamos que tengan mucha suerte!
Seguimos preparando las presentaciones de proyecto y robot y terminando los accesorios de la segunda y tercera rutas. La primera está ya lista y con ella batimos nuestro propio récord de retos en una sola ruta y además, con una accesorio relativamente sencillo: Contador de pasos (azul), 3 Porciones de salud colgadas del Larguero, Cinta de correr (verde oscuro), Máquina de Remo (rueda en círculo pequeño), Máquina de pesas (amarillo), 2 Figuras fuera del Tobogán, baja el Banco y se lleva el Respaldo, 2 Porciones de salud, la Rueda ligera y el Teléfono a Casa. Éstos 2 últimos ya los podemos poner a mano con el lado blanco hacia arriba en la Zona de Inicio antes de que termine la partida. Esta ruta tarda sólo 70 segundos y es bastante fiable gracias al gran trabajo que hemos hecho entre todos con el seguimiento de línea PID.
AldeaTec ha resuelto un problema con las ruedas. Tuvieron que taladrar un tornillo del hub de una rueda y el de un engranaje del eje de un motor para poder sacarlos, después de romper dos brocas, uff. También hubo que sustituir uno de los motores de las ruedas, que iba muy duro. Ahora las 4 ruedas van mucho más suaves.
Después de eso empezaron a colocar la rampa de plástico para subir las anillas hacia el cargador. Hay que darle calor para que coja la curvatura necesaria para que no toque el suelo, pero que al mismo tiempo no deje que las anillas se tropiecen al empezar a subir.
35ª semana
Seguimos preparando las presentaciones de proyecto y robot, para hacerlas lo mejor posible de forma online, sobre todo pensando en el sonido, que es lo que falló varias veces en la Final Nacional de la temporada pasada.
Prácticamente hemos terminado de programar la 2ª y 3ª rutas para empezar a ensayar la próxima semana, con ayuda de una tabla en la que recogeremos la estadística de las puntuaciones.
La 2ª ruta deja los 4 Cubos en los huecos del Banco y el Proyecto en el área gris a su alrededor, deja un Cubo en la Cesta de Baloncesto y la sube hasta la máxima altura, lanza un cubo al otro terreno (azul o rojo, según lo que acordemos con el otro equipo), recoge la Porción de salud de la zona de Baile y se lleva las Figuras del Tobogán a Casa.
La 3ª ruta deja 3 Porciones de salud sobre el logo RePLAY, deja el Neumático ligero con la pieza blanca hacia arriba dentro de su círculo, coloca una Figura sobre el Neumático pesado, pasa por debajo del Larguero, echa 8 Cubos en el campo de Boccia, uno de ellos, el amarillo, en la diana y se cuelga en el Larguero.
El equipo AldeaTec ha tenido una reunión con los otros 2 equipos canarios: Tech Cintegra (La Laguna) y Taquito´s Nazaret Team (Los Realejos). Todos en Tenerife.
Ha probado la rampa de plástico del recogedor de anillas, con la curva en el borde inferior, Para el sistema de empuje o arrastre de anillas hacia el cargador ha habido que imprimir en 3D 2 piezas para sujetar el eje superior.
En principio iban a probar a hacer el arrastre con una cadena del material FTC, pero se han decantado de momento por una oruga de LEGO, a la que se le pueden añadir piezas que suban las anillas.
Mayo de 2021
36ª semana
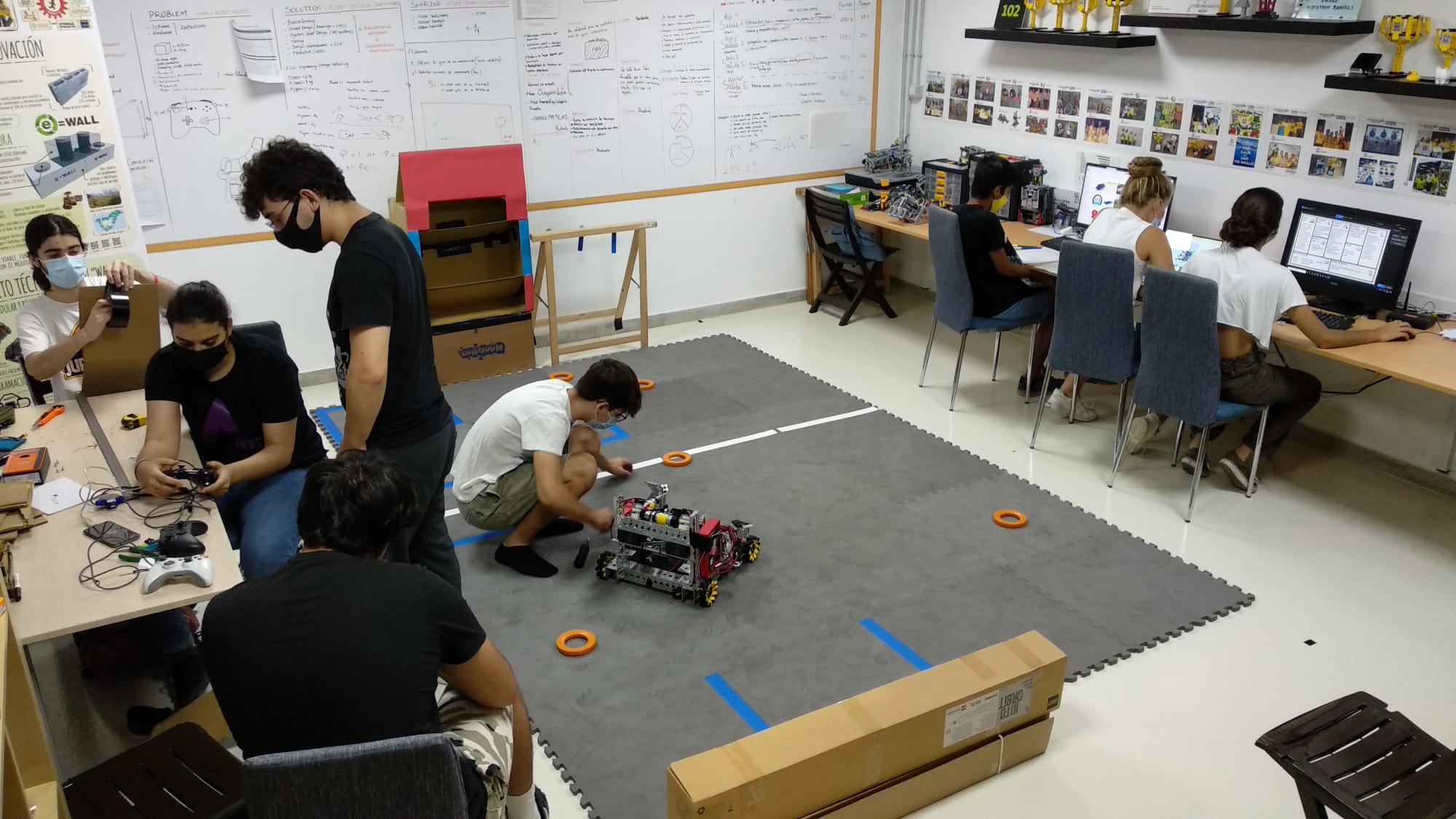
Empezamos ya a ensayar las partidas los viernes que quedan, esperando llegar a un total de 50 para completar la estadística; poco a poco le vamos cogiendo el tranquillo al cambio de accesorios, porque hay muchos detalles a tener en cuenta. Los sábados los dedicamos a repasar las presentaciones y terminar de preparar la documentación que enviaremos a los jueces. Así dejamos sitio para que nuestros compis de AldeaTec puedan practicar en su campo, que ocupa casi todo el espacio (3,60 x 2,40 m).
AldeaTec ya ha montado su campo completo por primera vez, aunque han estado liados probando el recogedor de anillas, cuya rampa se ha partido en varios trozos al engancharse con la unión de dos piezas del suelo al mover el robot. También han probado el brazo para mover las peonzas, y ajustaron la pinza de su extremo.
También ha habido tiempo para jugar a "enredados" 😂
Ya sólo quedan dos sesiones, a no ser que puedan reunirse entre semana. Harán lo que puedan para dar el máximo. Intentarán programar el modo autónomo, el más complicado, pero primero tendrán que terminar de ajustar y ensayar el modo teledirigido.
ACTUALIZACIÓN E=WALL
Por fín tenemos ya aprobada la Solicitud de Modelo de Utilidad, publicada el día 5 de mayo en el Boletín Oficial de la Propiedad Industrial ¡Ya queda menos!
37ª semana
Viernes muy bien aprovechado con un total de 20 rondas de práctica de robot, y una media de 301 ptos (nuestro máximo es de 555 ptos). Lo más complicado es hacer un cambio de accesorios rápido debido a la cantidad de modelos que tenemos que colocar en ellos. ¡Pero al final lo conseguiremos! Para tener más tiempo disponible intentaremos hacer las rutas más rápidas, manteniendo un siguelínea igualmente preciso. Otra cosa es lo que ocurra en las rondas presenciales 😅
El sábado continuamos ensayando las presentaciones de proyecto y robot, con algunas modificaciones para entrar en el tiempo de 5 minutos cada una. Tendremos que hacer ensayos con una conexión real para comprobar que se ve y oye correctamente todo lo que queremos decir a los jueces. Ya sólo quedan 11 días para nuestra participación online (jueves 27 por la tarde) y 13 días para las partidas presenciales (sábado 29 por la mañana).
El equipo AldeaTec ha progresado mucho con PEPE: han podido probar a recoger anillas con una nueva rampa y dispararlas ¡Va genial! Ahora les queda practicar todas las rondas que puedan, reuniéndose incluso entre semana, gracias a que ya acabaron sus exámenes finales, aunque tienen que prepararse para la EBAU. 💪
Han hecho con cartón una carcasa para proteger el cableado del robot, que luego se pasará a metacrilato y donde se grabará el número del equipo (norma obligatoria).



38ª semana
Otro viernes genial, con 20 rondas y una media de 361 ptos, ¡pero esta vez obtuvimos un máximo de 525! Todo gracias a que encontramos la forma más rápida de cambiar los accesorios. Seguiremos practicando para subir aún más la media.
El sábado lo dedicamos a practicar presentaciones con todo el material que vamos a utilizar y haciendo pruebas de conexiones con Google Meet. Estuvimos 10 horas seguidas en la academia, pero valió la pena. 😅
Presentamos el flyer con el que difundimos nuestro Proyecto de Innovación. La difusión es un pilar fundamental en todo proyecto, antes, durante y después del torneo.
Y también el del Diseño de QUA-BOT:
AldeaTec ya tiene sus camisetas oficiales y PEPE, su robot, también tiene la suya, con transparencias. 😁
Hoy se volvió a romper la rampa al salirse el robot del terreno de juego, así que habrá que hacer otra y una más de repuesto, por si acaso. También tuvieron un susto al surgir un problema con uno de los motores lanzadores (de los que no tienen repuesto 😬) Afortunadamente se solucionó ajustando el software.
Han sido unas largas, duras y emocionantes temporadas RePLAY y ULTIMATE GOAL, en las que hemos aprendido y disfrutado muchísimo. El próximo jueves 27, a las 17:55 h presentaremos nuestros proyectos RePLAY online y el sábado 29 acudiremos ambos equipos a la sede del INtech en La Laguna para jugar las rondas del juego del robot. Podrá verse todo en streaming...o eso esperamos.
 |
FLL & FTC working hard together
|
39ª semana
FLL CANARIAS Y FTC SPAIN
Ha llegado la gran cita para ambos equipos. El jueves 27 presentamos online nuestro proyecto de innovación 0UR-MAT y robot QUABOT, y el sábado nos acercamos a la sede del IACTec para disfrutar de unas rondas del Juego de Robot presenciales y reencontrarnos por fin con algunos equipos ya conocidos. Los jueces fueron muy amables y parece que les encantaron nuestros proyectos.
La primera ronda no fue muy bien, ya que el sensor de color 2 se había desconectado y al calibrar se hizo sólo con el 1. Obtuvimos 95 ptos. En la segunda teníamos desconectado el sensor 3, el que detecta los accesorios, así que el robot no dio con la segunda ruta, la tercera ni la de emergencia. Fueron 245 ptos; íbamos mejorando resolviendo problemas sobre la marcha. Ya la tercera fue aún mejor, aunque se atascó con un poste del Larguero, así que procedimos a usar la ruta de Emergencia y salió muy bien, terminado la partida todos bailando con QUABOT. Y conseguimos 300 ptos, lo que nos dio el Premio al Comportamiento del Robot.
Pero lo mejor vino en la ceremonia de clausura, en la que además pudieron estar presentes nuestros padres.
¡PRIMER PREMIO FUNDACIÓN SCIENTIA AL GANADOR!
Es la primera vez que un equipo obtiene ambos premios en la FLL Canarias, después de 9 ediciones. Pueden ver un reportaje de esta edición realizado por Canarias 2.0 en el siguiente enlace:
Mucha gracias como siempre a los voluntarios, equipos y organización por hacer posible la FLL Canarias un año más, a pesar de las circunstancias....y felicidades a todos los participantes por el esfuerzo en esta temporada tan larga y dura, en especial a nuestros amigos de La Jaca Robótica de Arico y a las chicas de Brilliant Minds, del Colegio Pureza de María La Cuesta, que se clasificaron con nosotros para la Gran Final FLL Spain.
El equipo AldeaTec tuvo el sábado 29 una jornada muy intensa en las mismas instalaciones que nosotros; igual que los otros dos equipos canarios Tech Cintegra y Taquito´s Nazaret Team. Primero presentaron online ante los jueces su cuaderno de ingeniería, en el que reflejaron todo el proceso de diseño, construcción y programación de su robot PEPE, además de sus valores como equipo.
A continuación disputaron 3 rondas seguidas, en las que fueron cambiando de pilotos... y no salieron mal del todo, acertando a darle incluso a varios Power Shots durante los últimos 30 segundos (End Game).
Como fin de fiesta jugamos una partida extraoficial con nuestros amigos del equipo Tech Cintegra.
Y también llegó la sorpresa para ellos en una ceremonia de entrega de premios online (en catalán, a pesar de ser mayoría canarios), mientras volvían a casa:
¡GANADORES DEL TORNEO EUROPEO FTC SPAIN CON EL INSPIRE AWARD!
Enhorabuena a todos y en especial a los 3 equipos tinerfeños por el gran éxito canario en esta tercera edición de FTC Spain. No podría haber acabado mejor la temporada, que empezó a principios de octubre intentando convencer a estos chicos de embarcarse en esta aventura, que seguro les abrirá muchas puertas en su futuro. ¡Mucha suerte en la EBAU y en los caminos que escojan! 💪
Junio de 2021
40ª semana
Una semana de resaca y celebraciones 😅. Para ello recibimos a nuestros amigos de La Jaca Robótica, tanto de FLL Challenge como de Explore, con los que pasamos un rato divertido e intercambiamos experiencias. En la Gran Final han inscrito dos equipos Explore, además de su equipo Challenge clasificado. ¡Mucho ánimo y suerte!
Nos han regalado este video tan genial ¡muchas gracias!
Seguimos trabajando en mejorar la presentación de nuestros proyectos para la Gran Final, que haremos online a pesar de que la organización ha invitado a Tenerife a 24 de los 50 equipos, lo que no nos parece justo ni acertado dadas las circunstancias actuales. Creemos que deberíamos estar todos o ninguno, siempre en igualdad de condiciones para los 50 equipos, aunque entendemos las buenas intenciones de la Fundación Scientia.
41ª semana
Empezando el viernes con un minitorneo con nuestros amigos del equipo lituano Lituanica X, con los que compartimos proyecto de innovación y robot, y jugamos una partida cada equipo ¡Hasta la próxima!
El sábado recibimos la visita sorpresa de nuestras voluntarias preferidas de la FLL Canarias, las hermanas y super-fans de la FIRST LEGO League, Zuleyka y Luisana Lara.¡Muchas gracias chicas!
Y videochateamos con el equipo catalán "Com tu vulgues", que significa "Como tú quieras". Menudo vacilón se traen cada vez que les preguntan su nombre 😂😂 Unos chicos geniales, con los que compartimos proyectos y prepararemos una sorpresa conjunta para la Gran Final.
Justo antes de la conexión con ellos nos falló el router y tuvimos que improvisar para no cancelar una reunión que no podíamos dejar pasar 😅
Y para que se entendiera mejor nuestro diseño del robot, sacamos toda la artillería, jaja.
En cuanto a Quabot, llevamos ya 90 partidas realizadas para incluir en nuestra estadística...¡y hemos vuelto a rozar nuestro máximo! 💪
42ª semana
Muy contentos de recibir a nuestro alcalde y varios concejales, que por fin ven cómo nos preparamos para la Gran Final y nos desearon mucha suerte.
Hemos ido a la playa para hacer un video conjunto con el equipo Com Tu Vulgues, que ambos presentaremos a los jueces. Lástima que ellos no puedan venir a Tenerife.
Como se puede ver, nosotros filmamos en la playa de La Tejita y ellos en una de Tarragona.
Seguimos ensayando presentaciones, simplificando un poco más los guiones para que se entiendan mejor y entrar en tiempo. En robot ya hemos superado las 100 rondas de práctica, completando la estadística. Aún así continuamos practicando y subiendo la media diaria, procurando hacer los 2 cambios de accesorios más rápidos, para terminar colgando a Qua-bot del Larguero varios segundos antes del final.
¡MUCHA SUERTE Y ÁNIMO A TODOS LOS PARTICIPANTES EN LA GRAN FINAL!
43ª semana
Esta semana nos reunimos miércoles, jueves y viernes para ensayar presentaciones y practicar con Qua-bot. Al final terminamos haciendo unas 120 rondas, llegando a máximos de 540 ptos. Y esta es la gráfica resultante de 43 semanas de trabajo duro con Quabot desde que lo diseñamos en LEGO Digital Designer:
El miércoles subimos de nivel de alerta por coronavirus en Tenerife, así que obligatorio el evento totalmente online. Lo sentimos por los equipos que vienen hacia la isla.
¡Y por fin llegó el gran día! El sábado 26 a las 10:30 h. llegó nuestro turno, con unos jueces y árbitro encantadores. Así era el programa:
Al principio tuvimos problemas con el sonido a través del móvil, a pesar de haberlo probado, así que decidimos quitarlo y tomarlo desde la webcam, como en la FLL Canarias. aunque esta vez se oía mejor. Después todo fue sobre ruedas y los jueces, encantadores, quedaron impresionados con ambas presentaciones.
Y el domingo nos llamaron para call-back (entre otros equipos seleccionados), es decir, tuvimos que exponer de forma resumida nuestros proyectos a otros jueces, para ayudarles a deliberar.
Aún no nos creemos el puesto en la puntuación de robot:
¡Con 530 puntazos en la segunda y tercera rondas! Pero lo mejor estaba por llegar:
Este es el listado de premios:
1er Premio Fundación Scientia al Ganador: 24-EDUROBOTIC HERMES - FLL Euskadi Deusto
2º Premio Cabildo de Tenerife al Ganador: 38-Aldeatrón ROBOTIX - FLL Canarias
3er Premio Parque Científico y Tecnológico al Ganador: 5-Legotronic Beavers - FLL Navarra
1er Premio ACER a los Valores FIRST: 48-TIMBERSATU - FLL Barcelona - La Salle
2º Premio a los Valores FIRST: 18-PLAY-ADS - FLL Lleida
3er Premio a los Valores FIRST: 26-Roboluti_ON - FLL Alicante
1er Premio Fundación Naturgy al Proyecto de Innovación: 36-KIOTA - FLL Barcelona - La Salle
2º Premio Vertix Grup Immobiliari al Proyecto de Innovación: 41-Tandebots - FLL Barcelona - UAB Tarda
3er Premio al Proyecto de Innovación: 34-Las Acacias BOT - FLL Galicia
1er Premio ACER al Diseño del Robot: 30-Vilabots - FLL Vic
2º Premio al Diseño del Robot: 42-Captioma STEAMS - FLL Galicia
3er Premio al Diseño del Robot: 46-ELYSIUM - FLL Madrid - UCJC
1er Premio Universidad de la Laguna al Comportamiento del Robot: 5-Legotronic Beavers - FLL Navarra
2º Premio Arquimea Research Center al Comportamiento del Robot: 38-Aldeatrón ROBOTIX - FLL Canarias
3er Premio al Comportamiento del Robot: 12-FEDAC Jr. Wolvineers - FLL Vic
Premio ROBOTIX Hands-on Learning a las Jóvenes Promesas: 33-Red Hot Chili Estanys - FLL Girona
Premio Tech Barcelona al Entrenador: 21-Legolàctics - FLL Vic
Premio Manuel Torres al Emprendimiento: 39-NEUROTICS - FLL Granada
¡Felicidades a los 50 equipos que nos acompañaron en la Gran Final por el gran trabajo realizado!
Importante siempre celebrar la temporada, independientemente del resultado final.
Como hacen los amigos de Alicante, el equipo Roboluti_ON, jaja.
Julio de 2021
44ª semana
Después de tanta emoción y celebración, toca reflexionar sobre lo conseguido y qué debemos mejorar. Lástima que se haya cancelado el World Festival en Detroit, ¡si no iríamos ambos equipos!
Hablando de logros, llegaron las medallas y el pedazo de trofeo, Inspire Award, de AldeaTec. Hasta su robot PEPE tiene medalla, jeje.
Nosotros fuimos a contar nuestra experiencia a Radio Sur Adeje, como es tradición, donde siempre nos recibe con los brazos abiertos Nacho Palacio.
Este sábado recibimos a dos de los nuevos componentes del equipo, Elisa y Samuel, y les contamos todo lo que nos dio tiempo sobre nuestra experiencia. Además, les hicimos una demostración del Juego del Robot y mira por dónde, ¡conseguimos nuestro máximo de 555 ptos!
¡FELIZ VERANO Y NOS VEMOS EN CARGO CONNECT!

























































































































































































































No hay comentarios:
Publicar un comentario